Motorstyring som funksjon av strøm
 Motorstyring kan gjøres avhengig av styrken på statorstrømmen. Startkretsen som funksjon av strømmen til en induksjonsmotor med viklet rotor er vist i fig. 1 a.
Motorstyring kan gjøres avhengig av styrken på statorstrømmen. Startkretsen som funksjon av strømmen til en induksjonsmotor med viklet rotor er vist i fig. 1 a.
I startøyeblikket når strømmen verdien I1, og etter et visst tidsintervall synker den til verdien I2 (fig. b). På dette tidspunktet blir en del av startmotstanden i rotorkretsen automatisk kortsluttet, strømmen stiger til verdien I1, for så å falle igjen til verdien I2, noe som gjør at en annen del av startmotstanden kortsluttes. Denne prosessen gjentas til alle stadier av startmotstanden er kortsluttet. For disse formålene brukes et overstrømsrelé, hvis viklinger er inkludert i motorens strømkrets.
Når du klikker på start knapp SB1 (se fig. A) aktiveres kontaktor KM, hvis hovedkontakter kobler motoren til nettverket ved felles startmotstand i rotorkretsen. I dette tilfellet mottar spolen til KA-reléet strøm, hvis åpningskontakter er i kretsen til akselerasjonsspolen K1.KA-reléet stilles inn slik at responstiden er kortere enn K1-kontaktoren. I tillegg bryter dens kontakter ved maksimalt tillatt verdi startstrøm åpen, og når strømmen synker til koblingsverdien, lukkes de igjen, på grunn av hvilken spolen K1 slås på gjennom kontaktene til reléet KA i øyeblikket av kortslutning av startmotstandstrinnet.
Relé KA vil fungere før akselerasjonskontaktor K1 aktiveres, og motoren vil akselerere når startmotstanden er fullt innført. Når startbryterstrømmen avtar, vil kontaktene til KA-reléet lukkes og spolen K1 slås på. Samtidig lukkes kontakten K1, noe som gir selvforsyning av spolen uavhengig av reléet KA, og kontakten i kontrollkretsen åpnes, og forhindrer for tidlig inkludering av akseleratoren K2.
Siden forsyningskontaktene K1 er en del av kortslutningen til startmotstanden, øker statorstrømmen til maksimalverdien og reléet KA, når det utløses, åpner kontaktene i forsyningskretsen til spolen K2. Når motoren når tilstrekkelig hastighet og statorstrømmen faller tilbake til koblingsstrømmen, vil kontaktene til reléet KA lukkes og slå på spolen K2, som kortslutter det andre trinnet av startmotstand til kontaktene.
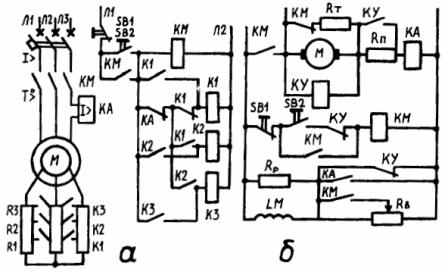
Ris. 1. Styrekretser avhengig av strømmen: a — asynkronmotor med faserotor; b — DC-motor med parallell magnetisering
I dette tilfellet øker statorstrømmen igjen, KA-reléet vil fungere og åpne kontaktene. Spole K2 vil ikke miste strøm da den vil ha tid til å lukkes med hjelpekontakter K2.En ytterligere reduksjon i statorstrømmen etter neste akselerasjon vil føre til at viklingen K3 slår seg på og kortslutter det siste trinnet i startmotstanden. Ved å trykke på SB-knappen stopper motoren og kretsen er klar for neste start. Ved å bruke strømreléene som er konfigurert til å returnere ved en strøm på 12, kan forskjellige elektriske stasjoner stoppes og reverseres. Ulempen med kontrollkretser i gjeldende funksjon er det ganske store antallet kontakter.
For irreversibel kontroll av en parallell-eksitert DC-motor på flere kilowatt, kan et enkelt trinn av startreostaten brukes (se fig. C). Diagrammet viser: reguleringsmotstand RB i eksitasjonskretsen; utladningsmotstand Rp koblet parallelt med eksitasjonsspolen LM; en bremsemotstand RT koblet parallelt med ankeret M når den er frakoblet nettverket og en startmotstand RP koblet i serie til ankerkretsen under startperioden. For å produsere maksimal fluks ved oppstart, slås LM-feltspolen i utgangsposisjon på med full spenning.
Når SB2-knappen trykkes inn, kobles motorens anker fra linjekontaktoren KM i serie til nettverket med motstanden RP Startkontrollreléet SC fungerer som en funksjon av ankerstrømmen. Når strømmen øker, manipulerer lukkekontakten til KA motstanden RB, øker den magnetiske eksitasjonsfluksen, og når strømmen avtar åpnes kontakten til KA og LM-spolen kobles i serie med motstanden til reostaten RB, pga. hvor den magnetiske strømmen avtar.
Når motoren startes, slår den økte startarmaturstrømmen på KA-reléet og LM-spolen skaper maksimal fluks. Når en viss hastighet er nådd, slås akselerasjonskontaktoren K på, startmotstanden RP kortsluttes, hvoretter motoren fungerer i henhold til sine naturlige egenskaper. Når ankerstrømmen avtar (som følge av motorakselerasjon) før KA-reléet aktiveres, åpnes KA-kontakten i magnetiseringskretsen.
LM-viklingen vil slå på i serie med RB-motstanden, noe som får feltfluksen til å svekkes og ankerstrømmen øker tilsvarende. KA-reléet vil fungere igjen, øker fluksen og øker samtidig motorhastigheten. Under oppstart utløses romfartøyets relé flere ganger til motoren når hastigheten satt av RB-kontrollreostaten. En slik vibrasjonsanordning som fungerer som en strømfunksjon forenkler kretsen sammenlignet med kontrollkretser som en funksjon av tid.
Når motoren slås på ved å trykke på SB1-knappen, slås ankeret på fra åpningskontakten KM til bremsemotstanden RT og dynamisk bremsing utføres automatisk. Ved starten av stoppet er magnetfeltet litt svekket på grunn av åpningen av KM-kontakten på glideren til reguleringsreostaten, og eksitasjonsstrømmen går gjennom hele motstanden RB. Når motorhastigheten synker ytterligere, blir akselerasjonskontaktoren K deaktivert og fluksen øker når eksitasjonsspolen slås på til full linjespenning gjennom åpningskontakten K, noe som resulterer i en økning i bremsemomentet.