Vekselstrøms elektriske maskiner
Elektriske maskiner brukes til å konvertere mekanisk energi til elektrisk energi (AC- og DC-generatorer) og omvendt (elektriske motorer).
I alle disse tilfellene brukes i hovedsak tre hovedfunn innen elektromagnetisme: fenomenet mekanisk interaksjon av strømmer oppdaget av Ampere i 1821, fenomenet elektromagnetisk induksjon oppdaget av Faraday i 1831, og den teoretiske oppsummeringen av disse fenomenene laget av Lenz (1834) i sin velkjente lov om retningen til den induserte strømmen (faktisk spådde Lenz lov loven om bevaring av energi for elektromagnetiske prosesser).

For å konvertere mekanisk energi til elektrisk energi eller omvendt, er det nødvendig å skape en relativ bevegelse av en ledende krets med en strøm og et magnetfelt (magnet eller strøm).
I elektriske maskiner designet for kontinuerlig drift, brukes rotasjonsbevegelsen til den bevegelige delen av maskinen (rotoren til vekselstrømsmaskinen) plassert inne i den stasjonære delen (statoren).Spolen til maskinen som tjener til å skape magnetfeltet kalles induktoren, og spolen som flyter rundt med driftsstrømmen kalles anker. Begge disse sistnevnte begrepene brukes også for DC-maskiner.
For å øke den magnetiske induksjonen plasseres maskinviklinger på ferromagnetiske legemer (stål, støpejern).
Alle elektriske maskiner har egenskapen til reversibilitet, det vil si at de kan brukes både som generatorer av elektrisk energi og som elektriske motorer.

Asynkrone motorer
Asynkronmotorer brukes en av manifestasjonene av elektromagnetisk induksjon… I fysikkkurs demonstreres det som følger:
Under en kobberskive, som kan rotere om en vertikal akse som går gjennom midten, er det plassert en vertikal hesteskomagnet som drives til å rotere om samme akse (det mekaniske samspillet mellom skiven og magneten er utelukket). I dette tilfellet begynner platen å rotere i samme retning som magneten, men med lavere hastighet. Hvis du øker den mekaniske belastningen på skiven (for eksempel ved å øke friksjonen til akselen mot trykklageret), reduseres rotasjonshastigheten.
Den fysiske betydningen av dette fenomenet er lett forklart av teorien om elektromagnetisk induksjon: når magneten roterer, dannes et roterende magnetfelt, som induserer virvelstrømmer i disken, størrelsen på sistnevnte avhenger, alt annet likt, på relativ hastighet på feltet og disken.
I følge Lenz sin lov skal skiven rotere i feltets retning. I fravær av friksjon må skiven oppnå en vinkelhastighet lik hastigheten til magneten, hvoretter den induserte emf vil forsvinne. I det virkelige liv er friksjon uunngåelig tilstede og platen blir tregere.Størrelsen avhenger av det mekaniske bremsemomentet som disken opplever.
Avviket mellom rotasjonshastigheten til skiven (rotoren) og rotasjonshastigheten til magnetfeltet gjenspeiles i navnet på motorene.
Prinsippet for drift av asynkronmotorer:
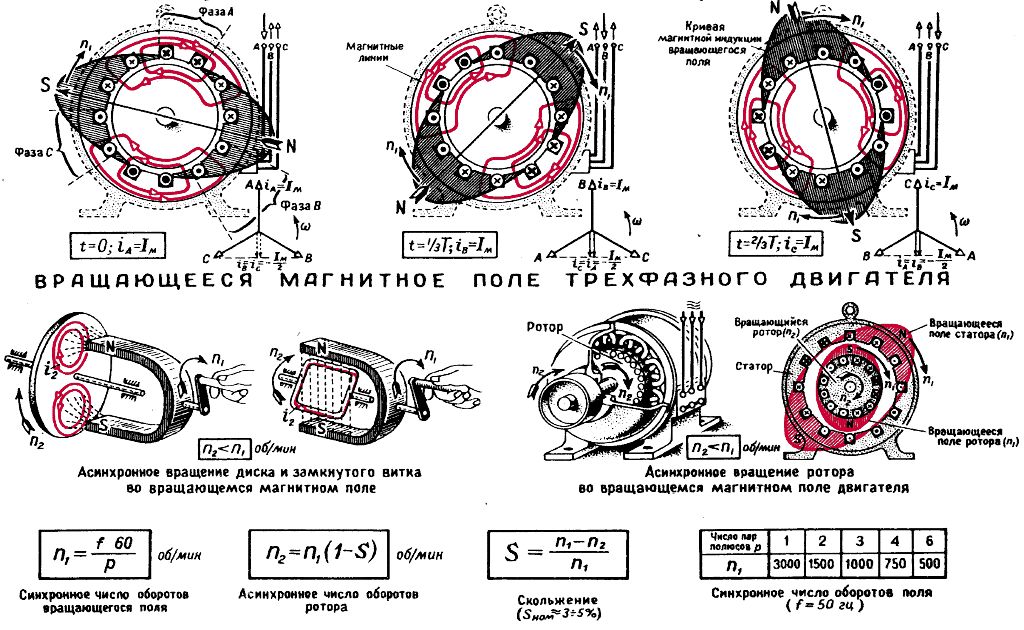
I tekniske asynkronmotorer (oftest trefasede) skapes et roterende magnetfelt flerfasestrømflyter rundt den stasjonære statorviklingen. Ved frekvensen av trefasestrøm er og antall statorspoler 3p roterende felt gjør n = f / p omdreininger / sek.

En roterbar rotor er plassert i statorhulrommet. En roterende mekanisme kan kobles til dens aksel I de enkleste "ekorncelle"-motorene består rotoren av et system av langsgående metallstenger plassert i sporene på en sylindrisk kropp av stål. Ledningene er kortsluttet av to ringer. For å øke dreiemomentet gjøres rotorens radius stor nok.
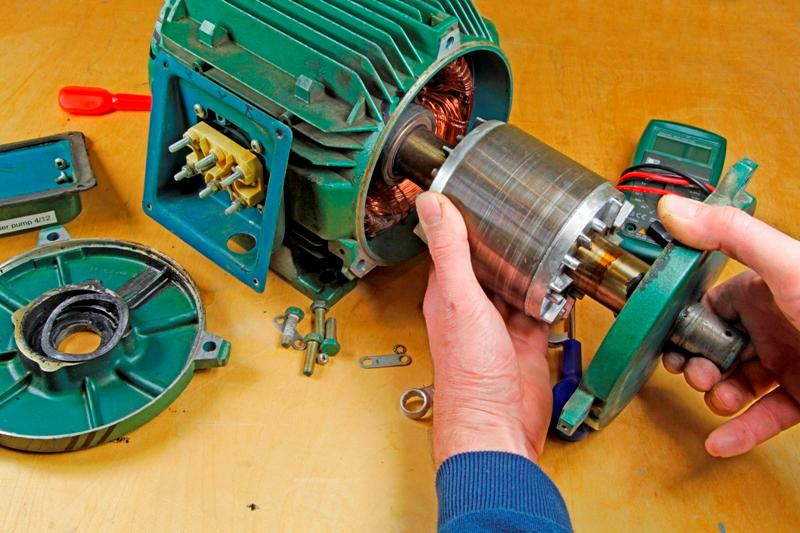
I andre motorkonstruksjoner (typisk høyeffektsmotorer) danner rotorledningene en åpen trefasevikling. Endene av spolene er kortsluttet i selve rotoren, og ledningene føres ut til tre sleperinger montert på rotorakselen og isolert fra denne.
En trefase reostat er koblet til disse ringene ved hjelp av skyvekontakter (børster), som tjener til å starte motoren i bevegelse. Etter at motoren er snudd, fjernes reostaten fullstendig og rotoren blir et ekornbur (se — Asynkronmotorer med viklet rotor).

Det er en koblingstavle på statorhuset. Statorviklingene føres ut til dem. De kan inkluderes stjerne eller trekant, avhengig av nettspenningen: i det første tilfellet kan nettspenningen være 1,73 ganger høyere enn det andre.
Verdien som karakteriserer den relative retardasjonen til rotoren sammenlignet med statorfeltet til induksjonsmotoren kalles sklir… Den endres fra 100 % (i det øyeblikk motoren startes) til null (ideelt tilfelle av tapsfri rotorbevegelse).
Reversering av rotasjonsretningen til induksjonsmotoren oppnås ved gjensidig svitsjing av hver to lineære ledere i det elektriske nettverket som forsyner motoren.

Ekornburmotorer er mye brukt i industrien. Fordelene med asynkrone motorer er enkelheten i designet og fraværet av glidekontakter.
Inntil nylig var den største ulempen med slike motorer vanskeligheten med hastighetsregulering, fordi hvis spenningen til statorkretsen endres for dette, endres dreiemomentet kraftig, men det var teknisk vanskelig å endre frekvensen til forsyningsstrømmen. Moderne mikroprosessorenheter er nå mye brukt for å kontrollere frekvensen til forsyningsstrømmen for å variere hastigheten til motorer — frekvensomformere.
Generatorer
Generatorer er bygget for betydelig kraft og høy spenning. Som asynkrone maskiner har de to viklinger. Normalt er ankerviklingen plassert i statorhuset. Induktorene som skaper den primære magnetiske fluksen er montert på rotoren og drives av en exciter - en liten DC-generator montert på rotorakselen. I kraftige maskiner skapes eksitasjonen noen ganger av en likerettet vekselspenning.
På grunn av armaturviklingens immobilitet forsvinner de tekniske vanskelighetene knyttet til bruk av skyvekontakter med høye krefter.
Figuren nedenfor viser et skjema over en enfasegenerator. Rotoren har åtte poler. På disse er viklet spoler (ikke vist på figuren) matet fra en ekstern kilde ved likestrøm påført sleperinger montert på rotorakselen. Polspolene er viklet på en slik måte at tegnene på polene som vender mot statoren veksler. Antall stolper skal være partall.
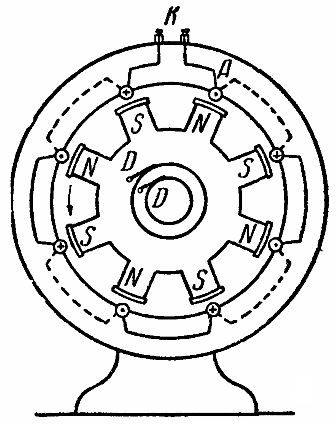
Armaturviklingen er plassert i statorhuset. Dens lange fungerende «aktive» ledninger, vinkelrett på tegningens plan, er vist i figuren med sirkler, de krysses av linjene for magnetisk induksjon når rotoren roterer.
Sirklene viser den øyeblikkelige fordelingen av retningene til de induserte elektriske feltene. Koblingsledningene som går langs forsiden av statoren er vist med heltrukne linjer, og på baksiden med stiplede linjer. K-klemmer brukes til å koble en ekstern krets til statorviklingen. Rotasjonsretningen til rotoren er angitt med en pil.
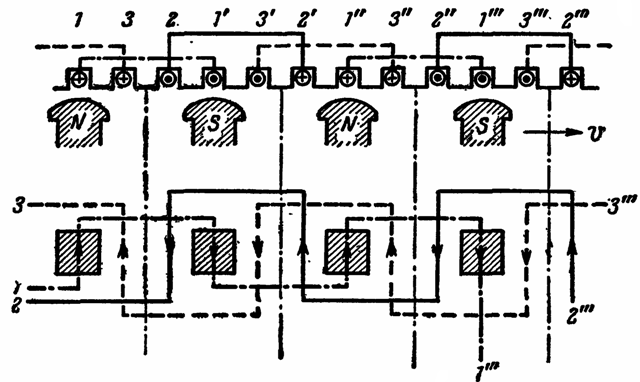
Hvis du mentalt kutter maskinen langs en radius som går mellom klemmene K og gjør den til et plan, vil den relative posisjonen til statorviklingen og rotorpolene (side og plan) bli avbildet med en skjematisk tegning:
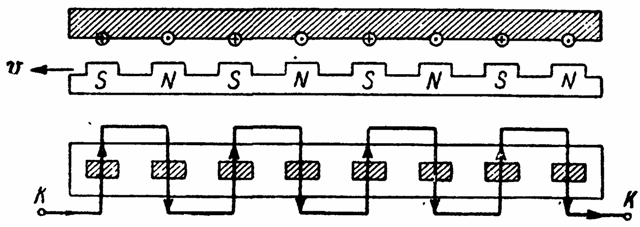
Med tanke på figuren, sørger vi for at alle de aktive ledningene (som går gjennom polene til induktoren) er koblet til hverandre i serie og EMF indusert i dem summeres. Fasene til alle EMF-er er åpenbart de samme.Under en fullstendig rotasjon av rotoren vil det oppnås fire komplette perioder med strømendring i hver av ledningene (og derfor i den ytre kretsen).
Hvis en elektrisk maskin har p par med poler og rotoren roterer med n omdreininger per sekund, så er frekvensen til vekselstrømmen mottatt av maskinen f = pn hz.
Siden frekvensen til EMF i nettverket må være konstant, må rotasjonshastigheten til rotorene være konstant. For å oppnå en EMF med teknisk frekvens (50 Hz), kan en relativt langsom rotasjon brukes dersom antallet rotorpoler er stort nok.
For å oppnå trefasestrøm plasseres tre separate viklinger i statorkroppen. Hver av dem er forskjøvet i forhold til de to andre med en tredjedel av bueavstanden mellom tilstøtende (motstående) poler til induktorene.
Det er lett å verifisere at når induktorene roterer, induseres elektromagnetiske felter i spolene forskjøvet i fase (i tid) med 120 °. Endene på spolene fjernes fra maskinen og kan kobles i stjerne eller trekant.
I en generator bestemmes den relative hastigheten til feltet og lederen av rotorens diameter, antall omdreininger til rotoren per sekund og antall polpar.

Hvis generatoren drives av en vannstrøm (hydrogenerator), er den vanligvis laget med langsomme omdreininger. For å oppnå ønsket strømfrekvens er det nødvendig å øke antall poler, noe som igjen krever en økning i rotorens diameter.
Av flere tekniske årsaker kraftige hydrogengeneratorer de har vanligvis en vertikal aksel og er plassert over den hydrauliske turbinen, noe som får dem til å rotere.

Dampturbindrevne generatorer - Turbingeneratorer er vanligvis høyhastighets. For å redusere mekaniske krefter har de små diametre og et tilsvarende lite antall poler En rekke tekniske hensyn krever produksjon av turbingeneratorer med horisontal aksel.
Hvis generatoren drives av en forbrenningsmotor, kalles den en dieselgenerator, siden dieselmotorer vanligvis brukes som motorer som bruker billigere drivstoff.

Generator reversibilitet, synkronmotorer
Hvis en vekselspenning påføres statorviklingen til generatoren fra en ekstern kilde, vil det være et samspill mellom polene til induktoren med magnetfeltet til strømmen generert i statoren, og dreiemomenter fra samme retning vil virke på alle stolper.
Hvis rotoren roterer med en slik hastighet at kort tid etter halvparten av perioden med vekselstrømmen, vil den neste polen til induktoren (motsatt i fortegn til den første polen) passe under den betraktede ledningen til statorviklingen, så vil tegnet til interaksjonskraften mellom den og strømmen, som har endret retning, vil forbli den samme.
Under disse forholdene vil rotoren, som er under kontinuerlig påvirkning av dreiemomentet, fortsette å bevege seg og vil være i stand til å drive enhver mekanisme. Å overvinne motstanden mot rotorens bevegelse vil skje på grunn av energien som forbrukes av nettverket, og generatoren vil bli en elektrisk motor.

Det skal imidlertid bemerkes at kontinuerlig bevegelse bare er mulig ved en strengt definert rotasjonshastighet, siden i tilfelle avvik fra den vil et akselererende moment delvis virke på hver av rotorens poler, og beveger seg mellom de to lederne til rotoren. stator, en del av tiden - stopper .
Dermed må rotasjonshastigheten til motoren bestemmes strengt, - tiden da polen erstattes av den neste må falle sammen med strømmens halvperiode, og det er grunnen til at slike motorer kalles synkront.
Hvis en vekselspenning påføres statorviklingen med en stasjonær rotor, så, selv om alle rotorens poler i løpet av den første halvsyklusen av strømmen opplever virkningen av dreiemomenter med samme fortegn, vil fortsatt, på grunn av treghet, rotoren vil ikke ha tid til å bevege seg. I neste halvsyklus vil fortegnet for dreiemomentene for alle rotorpolene endres til det motsatte.
Som et resultat vil rotoren vibrere, men vil ikke være i stand til å rotere. Derfor må synkronmotoren først avvikles, det vil si bringes til det normale antall omdreininger, og først da skal strømmen i statorviklingen slås på.
Utviklingen av synkronmotorer utføres ved hjelp av mekaniske metoder (ved lav effekt) og spesielle elektriske enheter (ved høye effekter).
Ved små lastendringer vil motorhastigheten automatisk endres for å tilpasse seg den nye lasten. Så når belastningen på motorakselen øker, bremser rotoren umiddelbart. Derfor endres faseforskyvningen mellom linjespenningen og den motsatt induserte EMF indusert av induktoren i statorviklingen.
I tillegg skaper ankerreaksjonen en avmagnetisering av induktorene, slik at statorstrømmen øker, induktorene opplever økt dreiemoment, og motoren begynner å rotere synkront igjen, og overvinner den økte belastningen. En lignende prosess skjer med belastningsreduksjon.
Med skarpe svingninger i belastningen kan denne tilpasningsevnen til motoren være utilstrekkelig, hastigheten vil endre seg betydelig, den vil "falle ut av synkronisme" og til slutt stoppe, mens induksjons-EMK indusert i statoren forsvinner, og strømmen i den øker skarpt. Derfor må skarpe svingninger i lasten unngås. For å stoppe motoren må du selvsagt først koble fra statorkretsen og deretter koble fra chokene; når du starter motoren, må du følge omvendt rekkefølge av operasjoner.
Synkronmotorer brukes oftest til å drive mekanismer som opererer med konstant hastighet. Her er fordelene og ulempene med synkronmotorer og metodene for å starte dem: Synkronmotorer og deres applikasjoner
Pedagogisk filmstripe - "Synchronous motors", laget av fabrikken for pedagogisk-visuelle hjelpemidler i 1966. Du kan se den her: Filmstripe «Synchronous Motor»
