Synkronmaskiner - motorer, generatorer og kompensatorer
 Synkronmaskiner er elektriske vekselstrømsmaskiner der rotoren og magnetfeltet til statorstrømmene roterer synkront.
Synkronmaskiner er elektriske vekselstrømsmaskiner der rotoren og magnetfeltet til statorstrømmene roterer synkront.
Trefase synkrongeneratorer er de kraftigste elektriske maskinene. Enhetseffekten til synkrone generatorer ved vannkraftverk er 640 MW, og ved termiske kraftverk - 8 - 1200 MW. I en synkronmaskin er en av viklingene koblet til et vekselstrømsnett og den andre eksiteres av DC. Vekselstrømsviklingen kalles armaturviklingen.
Armaturviklingen konverterer all den elektromagnetiske kraften til synkronmaskinen til elektrisk kraft og omvendt. Derfor plasseres den vanligvis på en stator, som kalles en armatur. Eksitasjonsspolen bruker 0,3 - 2% av den konverterte effekten, derfor er den vanligvis plassert på en roterende rotor, som kalles en induktor, og den lave eksitasjonseffekten leveres av sleperinger eller berøringsfrie magnetiseringsenheter.
 Armaturmagnetfeltet roterer med en synkron hastighet n1 = 60f1 / p, rpm, hvor p = 1,2,3 ... 64, etc. er antall polpar.
Armaturmagnetfeltet roterer med en synkron hastighet n1 = 60f1 / p, rpm, hvor p = 1,2,3 ... 64, etc. er antall polpar.
Med industriell nettverksfrekvens f1 = 50 Hz, en rekke synkrone hastigheter ved forskjellige antall poler: 3000, 1500, 1000, etc.). Siden magnetfeltet til induktoren er stasjonært i forhold til rotoren, må rotoren rotere med samme synkrone hastighet for den kontinuerlige interaksjonen mellom feltene til induktoren og ankeret.
 Konstruksjon av synkronmaskiner
Konstruksjon av synkronmaskiner
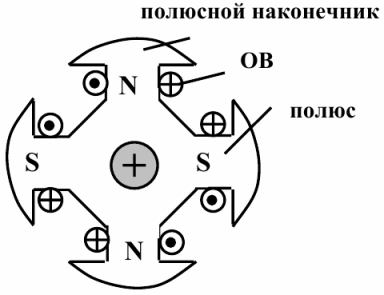
Statoren til en synkron maskin med en trefaset vikling er ikke forskjellig i konstruksjon asynkron maskinstator, og rotoren med en spennende spole er av to typer - fremtredende pol og implisitt pol. Ved høye hastigheter og et lite antall poler brukes implisitt-polrotorer fordi de har en mer holdbar struktur, og ved lave hastigheter og et stort antall poler brukes fremtredende polrotorer av modulær konstruksjon. Styrken til slike rotorer er mindre, men de er lettere å produsere og reparere. Tilsynelatende polrotor:
 De brukes i synkronmaskiner med et stort antall poler og en tilsvarende lav n. Vannkraftverk (hydrogeneratorer). frekvens n fra 60 til flere hundre omdreininger per minutt. De kraftigste hydrogeneratorene har en rotordiameter på 12 m med en lengde på 2,5 m, p - 42 og n = 143 rpm.
De brukes i synkronmaskiner med et stort antall poler og en tilsvarende lav n. Vannkraftverk (hydrogeneratorer). frekvens n fra 60 til flere hundre omdreininger per minutt. De kraftigste hydrogeneratorene har en rotordiameter på 12 m med en lengde på 2,5 m, p - 42 og n = 143 rpm.
Indirekte rotor:
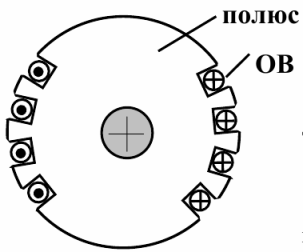 Vikling — diameter d = 1,2 — 1,3 m i rotorkanalene, rotorens aktive lengde er ikke mer enn 6,5 m. TPP, NPP (turbingeneratorer). S = 500 000 kVA i en maskin n = 3000 eller 1500 rpm (1 eller 2 polpar).
Vikling — diameter d = 1,2 — 1,3 m i rotorkanalene, rotorens aktive lengde er ikke mer enn 6,5 m. TPP, NPP (turbingeneratorer). S = 500 000 kVA i en maskin n = 3000 eller 1500 rpm (1 eller 2 polpar).
I tillegg til feltspolen er det plassert et spjeld eller demperspole på rotoren som brukes til start i synkronmotorer. Denne spolen er laget lik en kortslutningsspole for ekornbur, bare av en mye mindre seksjon, siden hovedvolumet til rotoren tas opp av feltspolen.I uensartede polrotorer spilles rollen til spjeldviklingen av overflatene til rotorens solide tenner og de ledende kilene i kanalene.
Likestrøm i eksitasjonsviklingen til en synkron maskin kan tilføres fra en spesiell DC-generator installert på maskinens aksel og kalles exciteren, eller fra strømnettet gjennom en halvlederlikeretter.  Se også om dette emnet:
Se også om dette emnet:
Formål og arrangement av synkronmaskiner
Hvordan synkrone turboer og hydrogeneratorer fungerer
En synkronmaskin kan fungere som en generator eller en motor. En synkronmaskin kan fungere som motor hvis trefaset nettstrøm tilføres statorviklingen. I dette tilfellet, som et resultat av samspillet mellom stator- og rotormagnetiske felt, bærer statorfeltet rotoren med seg. I dette tilfellet roterer rotoren i samme retning og med samme hastighet som statorfeltet.

Generatordriften til synkronmaskiner er den vanligste, og nesten all elektrisk energi genereres av synkrongeneratorer Synkronmotorer brukes med effekt over 600 kW og inntil 1 kW som mikromotorer. Synkrone generatorer for spenninger opp til 1000 V brukes i enheter for autonome strømforsyningssystemer.
Enheter med disse generatorene kan være stasjonære og mobile. De fleste enheter brukes med dieselmotorer, men de kan drives av gassturbiner, elektriske motorer og bensinmotorer.
En synkronmotor skiller seg fra en synkrongenerator kun ved en startdempende spole, som skal sikre gode startegenskaper til motoren.
Opplegg av en seks-polet synkron generator.Tverrsnitt av viklingene til en fase (tre seriekoblede viklinger) er vist. Viklingene til de to andre fasene passer inn i de frie sporene vist på figuren. Fasene er koblet i stjerne eller trekant.
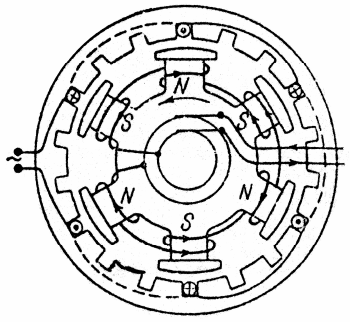
Generatormodus: motoren (turbinen) roterer rotoren, hvis spole forsynes med konstant spenning? det er en strøm som skaper et permanent magnetfelt. Magnetfeltet roterer med rotoren, krysser statorviklingene og induserer en EMF av samme størrelse og frekvens, men forskjøvet med 1200 (symmetrisk trefasesystem).
Motormodus: statorviklingen er koblet til et trefaset nettverk, og rotorviklingen til en likestrømskilde. Som et resultat av samspillet mellom maskinens roterende magnetfelt og likestrømmen til eksitasjonsspolen, oppstår et dreiemoment Mvr, som driver rotoren til å rotere med magnetfeltets hastighet.
Mekanisk karakteristikk av en synkronmotor - avhengighet n (M) - er en horisontal seksjon.
Educational Filmstrip - "Synchronous Motors" produsert av Educational Materials Factory i 1966.
Du kan se den her: Filmstripe «Synchronous Motor»
 Anvendelse av synkronmotorer Massebruken av asynkronmotorer med betydelig underbelastning kompliserer driften av kraftsystemer og stasjoner: kraftfaktoren i systemet reduseres, noe som fører til ytterligere tap i alle enheter og linjer, samt til utilstrekkelig bruk i vilkår for aktiv kraft. Derfor ble bruk av synkronmotorer nødvendig, spesielt for mekanismer med kraftige drev.
Anvendelse av synkronmotorer Massebruken av asynkronmotorer med betydelig underbelastning kompliserer driften av kraftsystemer og stasjoner: kraftfaktoren i systemet reduseres, noe som fører til ytterligere tap i alle enheter og linjer, samt til utilstrekkelig bruk i vilkår for aktiv kraft. Derfor ble bruk av synkronmotorer nødvendig, spesielt for mekanismer med kraftige drev.
Synkronmotorer har en stor fordel i forhold til asynkronmotorer, som er at de takket være DC-eksitasjon kan jobbe med cosphi = 1 og ikke forbruker reaktiv kraft fra nettverket, og under drift, når de overspennes, gir de til og med reaktiv effekt til Nettverk. Som et resultat forbedres kraftfaktoren til nettverket og spenningsfallet og tapene i det reduseres, samt effektfaktoren til generatorene som opererer i kraftverk.
Maksimalt dreiemoment for en synkronmotor er proporsjonal med U, og for en asynkronmotor U2.
Derfor, når spenningen faller, beholder synkronmotoren en høyere belastningskapasitet. I tillegg gjør bruken av muligheten for å øke eksitasjonsstrømmen til synkronmotorer det mulig å øke deres pålitelighet i tilfelle nødspenningsfall i nettverket og i disse tilfellene forbedre driftsforholdene til kraftsystemet som helhet. På grunn av den større størrelsen på luftgapet, er de ekstra tapene i stålet og i rotorhuset til synkronmotorer mindre enn for asynkronmotorer, derfor er effektiviteten til synkronmotorer vanligvis høyere.
På den annen side er konstruksjonen av synkronmotorer mer komplisert enn squirrel-cage induksjonsmotorer, og i tillegg må synkronmotorer ha en exciter eller annen enhet for å forsyne en DC-spole. Som et resultat er synkronmotorer i de fleste tilfeller dyrere enn asynkrone ekorn-burmotorer.
Under driften av synkronmotorer oppsto det betydelige vanskeligheter med å starte dem.Disse vanskelighetene er allerede overvunnet.

Start og hastighetskontroll av synkronmotorer er også vanskeligere. Imidlertid er fordelen med synkronmotorer så stor at det ved høy effekt er tilrådelig å bruke dem der hvor hyppige starter og stopp og hastighetskontroll ikke er nødvendig (motorgeneratorer, kraftige pumper, vifter, kompressorer, møller, knusere og etc.). ).
Se også:
Typiske ordninger for start av synkronmotorer
Elektromekaniske egenskaper til synkronmotorer
Synkrone kompensatorer
Synkrone kompensatorer er designet for å kompensere strømfaktoren til nettverket og opprettholde det normale spenningsnivået til nettverket i områder der forbrukerbelastningen er konsentrert. Den overeksiterte driftsmodusen til den synkrone kompensatoren er normal når den leverer reaktiv kraft til nettet.
I denne forbindelse kalles kompensatorer, så vel som kondensatorbanker som tjener samme formål, installert på forbrukerstasjoner, også reaktive kraftgeneratorer. Men i perioder med redusert brukerbelastning (for eksempel om natten), er det ofte nødvendig å bruke synkrone kompensatorer og i undereksitasjonsmodus, når de bruker induktiv strøm og reaktiv effekt fra nettverket, siden nettverksspenningen i disse tilfellene har en tendens til å øke, og for å opprettholde det på et normalt nivå, er det nødvendig å belaste nettverket med induktive strømmer, noe som forårsaker ytterligere spenningsfall i det.
For dette formål er hver synkron kompensator utstyrt med en automatisk eksitasjons- eller spenningsregulator, som regulerer størrelsen på eksitasjonsstrømmen slik at spenningen ved terminalene til kompensatoren forblir konstant.