Frekvensregulering av en asynkronmotor
For tiden er frekvenskontroll av rotasjonsvinkelhastigheten til en elektrisk stasjon med en asynkronmotor mye brukt, siden den tillater i et bredt spekter å jevnt endre rotasjonshastigheten til rotoren både over og under den nominelle verdien.
Frekvensomformere er moderne, høyteknologiske enheter med et bredt justeringsområde som har et omfattende sett med funksjoner for styring av asynkronmotorer. Den høyeste kvaliteten og påliteligheten gjør det mulig å bruke dem i ulike bransjer for å kontrollere drifter av pumper, vifter, transportører, etc.

Frekvensomformere for forsyningsspenning er delt inn i enfase og trefase, men etter design, i roterende og statiske elektriske maskiner. I elektriske maskinomformere oppnås den variable frekvensen ved å bruke konvensjonelle eller spesielle elektriske maskiner. V statiske frekvensomformere endringen i frekvensen til forsyningsstrømmen oppnås ved bruk av elektriske elementer som ikke har noen bevegelse.
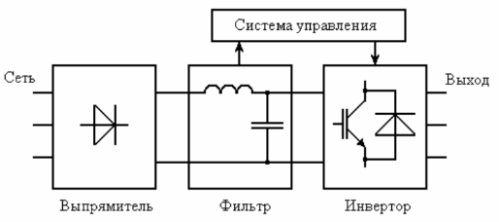
Frekvensomformerkrets for en induksjonsmotor
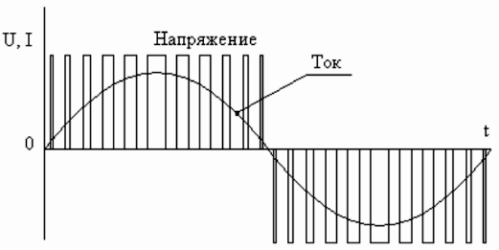
Utgangssignal fra frekvensomformeren
Frekvensomformere for enfasenett kan gi elektrisk drift for produksjonsutstyr med en effekt på opptil 7,5 kW. Et trekk ved utformingen av moderne enfaseomformere er at ved inngangen er det en fase med en spenning på 220V, og ved utgangen er det tre faser med samme spenningsverdi, som gjør det mulig å koble trefasede elektriske motorer til en enhet uten bruk av kondensatorer.
Frekvensomformere drevet av 380V trefasenett er tilgjengelig i effektområdet fra 0,75 til 630 kW. Avhengig av strømverdien produseres enheter i polymerkombinert og metallhus.
Den mest populære kontrollstrategien for induksjonsmotorer er vektorkontroll. For tiden implementerer de fleste frekvensomformere vektorkontroll eller til og med sensorløs vektorkontroll (denne trenden finnes i frekvensomformere som opprinnelig implementerer skalarkontroll og ikke har terminaler for tilkobling av en hastighetssensor).
Avhengig av typen utgangslast, er frekvensomformere delt inn i henhold til typen implementering:
-
for pumpe- og viftedrift;
-
for generell industriell elektrisk fremdrift;
-
fungerer som en del av elektriske motorer som opererer med overbelastning.

Mekaniske egenskaper for typiske belastninger
Moderne frekvensomformere har et mangfoldig sett med funksjonelle egenskaper, for eksempel har de manuell og automatisk kontroll av hastigheten og rotasjonsretningen til motoren, samt innebygd potensiometer på kontrollpanelet.Begavet med muligheten til å justere utgangsfrekvensområdet fra 0 til 800 Hz.
Omformere er i stand til å automatisk kontrollere en asynkronmotor i henhold til signaler fra perifere sensorer og drive en elektrisk stasjon i henhold til en gitt tidsalgoritme. Støtt automatiske gjenopprettingsfunksjoner i tilfelle kortvarig strømbrudd. Utfør transientkontroll fra en ekstern konsoll og beskytt elektriske motorer mot overbelastning.

Forholdet mellom rotasjonsvinkelhastigheten og frekvensen til tilførselsstrømmen følger av lign
ωo = 2πe1/ p
Med en konstant forsyningsspenning U1 og en endring i frekvens endres den magnetiske fluksen til induksjonsmotoren. Samtidig, for bedre bruk av det magnetiske systemet, med en reduksjon i strømforsyningsfrekvensen, er det nødvendig å redusere spenningen proporsjonalt, ellers vil magnetiseringsstrømmen og tapene i stålet øke betydelig.
På samme måte, når forsyningsfrekvensen øker, må spenningen øke proporsjonalt for å holde den magnetiske fluksen konstant, fordi ellers (med et konstant akselmoment) vil dette føre til at rotorstrømmen øker, overbelastning av viklingene ved strøm og redusere det maksimale dreiemomentet.
Den rasjonelle spenningsreguleringsloven avhenger av arten av motstandsmomentet.
Ved et konstant moment av statisk last (Ms = const) må spenningen reguleres i forhold til dens frekvens U1 / f1 = const. For arten av viftebelastningen har forholdet formen U1 / f21 = konst.
Med lastmoment omvendt proporsjonalt med turtall U1 /√f1 = konst.
Figurene nedenfor viser et forenklet koblingsskjema og mekaniske egenskaper for en induksjonsmotor med frekvensstyring av vinkelhastighet.
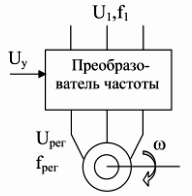
Tilkoblingsskjema for en frekvensomformer til en asynkronmotor
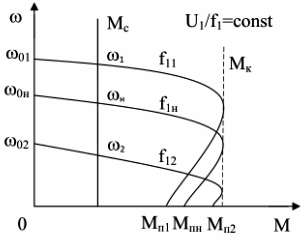
Egenskaper for en last med konstant statisk motstandsmoment
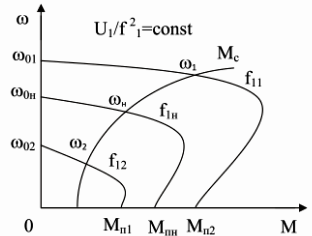
NSF-funksjoner for lading av viften
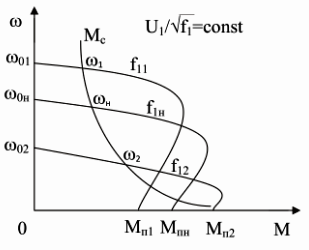
Karakteristikk under statisk belastning dreiemoment omvendt proporsjonalt med vinkelhastigheten til rotasjonen
Frekvensregulering av hastigheten til en asynkronmotor lar deg endre vinkelhastigheten på rotasjonen i området - 20 … 30 til 1. Regulering av hastigheten til en asynkronmotor ned fra hovedmotoren utføres praktisk talt til null.
Når frekvensen til forsyningsnettverket endres, avhenger den øvre grensen for rotasjonshastigheten til en asynkronmotor av dens mekaniske egenskaper, spesielt siden ved frekvenser over den nominelle asynkronmotoren fungerer med bedre energiegenskaper enn ved lavere frekvenser. Derfor, hvis en girkasse brukes i drivsystemet, må denne frekvenskontrollen av motoren utføres ikke bare ned, men også opp fra det nominelle punktet, opp til den maksimalt tillatte rotasjonshastigheten under betingelsene for den mekaniske styrken til rotoren.
Når motorhastigheten øker over verdien som er angitt i passet, bør frekvensen til strømkilden ikke overstige den nominelle med ikke mer enn 1,5 - 2 ganger.
Frekvensmetoden er mest lovende for regulering av en ekorn-burrotorinduksjonsmotor. Krafttapene med slik regulering er små, da de ikke er ledsaget av en økning i sklir… De resulterende mekaniske egenskapene er svært stive.