Generatorsystem — DC-motor
 Ulike maskinverktøy krever ofte trinnløs kontroll av kjørehastigheten over et større område enn det som kan gis ved å justere den magnetiske fluksen. DC-motor med parallell magnetisering… I disse tilfellene brukes mer komplekse elektriske drivsystemer.
Ulike maskinverktøy krever ofte trinnløs kontroll av kjørehastigheten over et større område enn det som kan gis ved å justere den magnetiske fluksen. DC-motor med parallell magnetisering… I disse tilfellene brukes mer komplekse elektriske drivsystemer.
I fig. 1 viser et diagram av en justerbar elektrisk drift i henhold til et generator-motorsystem (forkortet G - D). I dette systemet roterer en induksjonsmotor IM kontinuerlig en uavhengig eksitert DC-generator G og en exciter B, som er en parallell-eksitert laveffekt DC-generator.
DC-motoren D driver arbeidskroppen til maskinen. Eksitasjonsviklingene til generatoren OVG og motorens ATS forsynes av magnetiseringen B. Ved å endre motstanden til eksitasjonskretsen til generatoren G av reostat 1, endres spenningen som påføres ankeret til motoren D, og dermed hastigheten på motoren er regulert. I dette tilfellet går motoren med full og konstant fluks fordi reostat 2 er fjernet.
Når spenningen U endres, endres hastigheten n0 ideelt tomgangshastighet D. Siden motorfluksen og dens ankerkretsmotstand ikke endres, forblir helningen b konstant. Derfor er de rettlinjede mekaniske egenskapene som tilsvarer forskjellige verdier av U plassert under hverandre og parallelt med hverandre (fig. 2).
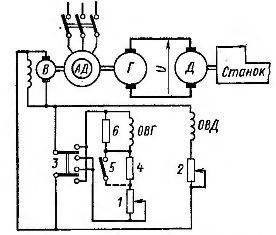
Ris. 1. Systemgenerator - DC-motor (dpt)
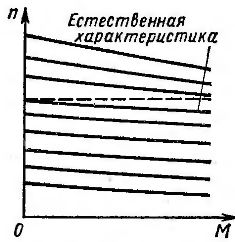
Ris. 2. Mekaniske egenskaper til generatoren - DC-motorsystem
De har en større helling enn egenskapene til den samme elektriske motoren matet fra det konstante nettverket, siden i G - D-systemet avtar spenningen U ved en konstant eksitasjonsstrøm til generatoren med økende belastning i henhold til avhengigheten:
hvor f.eks. og rg — e, henholdsvis. etc. s. og den indre motstanden til generatoren.
I analogi med asynkrone motorer, betegner vi
Denne verdien karakteriserer reduksjonen i motorturtallet når belastningen øker fra null til nominell. For parallelle mekaniske egenskaper
Denne verdien øker når n0 synker. Ved store verdier av sn vil de angitte skjæreforholdene endres betydelig med tilfeldige lastsvingninger. Derfor er spenningsreguleringsområdet vanligvis mindre enn 5:1.
Etter hvert som motorenes merkeeffekt avtar, øker spenningsfallet over motorene og de mekaniske egenskapene blir brattere. Av denne grunn reduseres spenningsreguleringsområdet til G -D-systemet når effekten avtar (for effekter mindre enn 1 kW til 3:1 eller 2:1).
Etter hvert som generatorens magnetiske fluks avtar, påvirker dens avmagnetiseringseffekt av ankerreaksjonen spenningen i større grad. Derfor har egenskapene knyttet til lave motorturtall faktisk større helning enn de mekaniske egenskapene.
Utvidelsen av kontrollområdet oppnås ved å redusere den magnetiske fluksen til motoren D ved hjelp av reostat 2 (se fig. 1), produsert ved full strøm av generatoren.Denne metoden for hastighetsregulering tilsvarer egenskaper plassert over det naturlige. en (se fig. 2).
Det totale kontrollområdet, lik produktet av kontrollområdene til begge metodene, når (10 - 15): 1. Spenningsregulering er konstant dreiemomentkontroll (siden den magnetiske fluksen til motoren forblir uendret). Regulering ved å endre den magnetiske fluksen til motoren D er en konstant effektregulering.
Før motoren startes, fjernes D-reostat 2 (se fig. 1) fullstendig og motorfluksen når den høyeste verdien. Deretter øker reostaten 1 eksitasjonen av generatoren G. Dette fører til at spenningen øker og hastigheten til motoren D øker. Hvis spolen OVG kobles umiddelbart til fullspenningen UB til exciteren B, vil strømmen i den, som i enhver krets med induktans og aktiv motstand, øke:
der rv er resistansen til eksitasjonsspolen, LB er dens induktans (se bort fra effekten av metningen til den magnetiske kretsen).
I fig. 3 viser a (kurve 1) en graf over eksitasjonsstrømmens avhengighet av tid. Eksitasjonsstrømmen øker gradvis; økningshastigheten bestemmes av forholdet

hvor Tv er den elektromagnetiske tidskonstanten til generatorens eksitasjonsvikling; den har tidsdimensjonen.
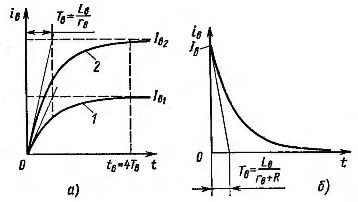
Ris. 3. Endring av eksitasjonsstrømmen i G-D-systemet
Endringen i generatorspenning ved oppstart har omtrent samme karakter som endringen i eksitasjonsstrøm. Dette gjør at motoren starter automatisk med reostat 1 fjernet (se fig. 1).
Økningen i eksitasjonsstrømmen til generatoren blir ofte akselerert (tvunget) ved å påføre eksitasjonsviklingen i det første øyeblikket en spenning som overstiger den nominelle. Da vil prosessen med å øke eksitasjonen fortsette langs kurve 2 (se fig. 3, en ). Når strømmen i spolen når Iv1, lik steady-state eksitasjonsstrømmen ved nominell spenning, reduseres spenningen til magnetiseringsspolen til den nominelle. Stigetiden for eksitasjonsstrømmen til den nominelle reduseres.
For å tvinge eksiteringen av generatoren, velges magnetiseringsspenningen V (se fig. 1) 2-3 ganger høyere enn den nominelle spenningen til generatorens eksitasjonsspolen og en ekstra motstand 4 introduseres i kretsen. …
Generator-motorsystemet muliggjør regenerativ bremsing. For å stoppe er det nødvendig at strømmen i armaturet endrer retning. Dreiemomentet vil også endre fortegn og i stedet for å kjøre, blir det bremsing. Stopp skjer når den magnetiske fluksen til motorreostat 2 øker eller når generatorspenningen synker med reostat 1. I begge tilfeller, f.eks. etc. c. E på motoren blir høyere enn spenningen U på generatoren.I dette tilfellet fungerer motor D i generatormodus og drives i rotasjon av den kinetiske energien til de bevegelige massene, og generator G opererer i motormodus, og roterer IM-maskinen med supersynkron hastighet, som samtidig skifter til generatormodus og leverer strøm til nettverket.
Regenerativ bremsing kan utføres uten å påvirke reostat 1 og 2. Du kan ganske enkelt åpne generatorens eksitasjonskrets (f.eks. bryter 3). I dette tilfellet vil strømmen i en lukket krets bestående av eksitasjonsviklingen til generatoren og motstanden 6 gradvis avta
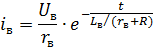
hvor R er motstanden til motstand 6.
Grafen som tilsvarer denne ligningen er vist i fig. 3, b. En gradvis reduksjon i eksitasjonsstrømmen til generatoren i dette tilfellet tilsvarer en økning i motstanden til reostat 1 (se fig. 1) og forårsaker regenerativ bremsing. I denne kretsen er motstanden 6 koblet parallelt med eksitasjonsviklingen til generatoren en utladningsmotstand. Den beskytter magnetiseringsviklingens isolasjon mot skade i tilfelle et plutselig nødavbrudd av magnetiseringskretsen.
Når eksitasjonskretsen avbrytes, avtar den magnetiske fluksen til maskinen kraftig, induserer e i svingene til eksitasjonsspolen. etc. c. selvinduktansen er så stor at den kan føre til at viklingsisolasjonen brytes ned. Utladningsmotstanden 6 danner en krets hvor f.eks. etc. c. selvinduksjonen av feltspolen induserer en strøm som bremser reduksjonen av den magnetiske fluksen.
Spenningsfallet over utladningsmotstanden er lik spenningen over feltspolen.Jo lavere verdi av utladningsmotstanden er, desto lavere er spenningen til eksitasjonsspolen når kretsen brytes. Samtidig, med en reduksjon i motstandsverdien til utladningsmotstanden, strømmer strømmen kontinuerlig gjennom den i normal modus og tapene i den øker. Begge bestemmelsene må tas i betraktning ved valg av utladningsmotstandsverdi.
Etter at eksitasjonsviklingen til generatoren er slått av, forblir en liten spenning på terminalene på grunn av gjenværende magnetisme. Dette kan føre til at motoren spinner sakte med det som kalles krypehastighet. For å eliminere dette fenomenet, kobles eksitasjonsviklingen til generatoren, etter å ha blitt koblet fra magnetiseringen, til terminalene på generatoren slik at spenningen fra den gjenværende magnetismen forårsaker en avmagnetiseringsstrøm i eksitasjonsviklingen til generatoren.
For å reversere den elektriske motoren D, endres retningen til strømmen i eksitasjonsspolen til generatoren OVG G ved hjelp av bryter 3 (eller en annen lignende enhet). På grunn av den betydelige induktansen til spolen, avtar eksitasjonsstrømmen gradvis, endrer retning og øker deretter gradvis.
Prosessene med å starte, stoppe og reversere motoren i det betraktede systemet er svært økonomiske, siden de utføres uten bruk av reostater inkludert i ankeret. Motoren startes og bremses ved hjelp av lett og kompakt utstyr som kun kontrollerer små feltstrømmer. Derfor anbefales dette "generator - DC-motor"-systemet å brukes til arbeid med hyppige starter, bremser og reverseringer.
De viktigste ulempene med motor-generator-DC-systemet er relativt lav effektivitet, høye kostnader og tungvint på grunn av tilstedeværelsen av et stort antall elektriske maskiner i systemet. Prisen på systemet overstiger prisen på en asynkron ekorn-burmotor med samme effekt 8 - 10 ganger. Dessuten slike elektrisk drivsystem krever mye plass.