Statiske belastninger på motorer til hovedkranmekanismer
Kraften og dreiemomentet til motorakselen til krantaljen i statisk modus for å løfte lasten kan beregnes ved hjelp av formlene
hvor P er motorens akseleffekt, kW; G er kraften som kreves for å løfte lasten, N; G0 — løftekraften til gripeanordningen, N; M er motorakselmomentet, Nm; v er hastigheten for å løfte lasten, m / s; D er diameteren til tauevinsjtrommelen, m; η — effektiviteten til løftemekanismen; i er girforholdet til girkassen og kjettingtaljen.
I nedstigningsmodus utvikler kranmotoren kraft lik forskjellen mellom friksjonskraften Ptr og kraften på grunn av virkningen av vekten til den synkende lasten Pgr:
Ved senking av middels og tung last ledes energi fra girakselen til motoren fordi Pgr >> Ptr (bremsefrigjøring). I dette tilfellet vil motorakseleffekten, kW, uttrykkes med formelen

Ved senking av lett last eller tom krok kan det være tilfeller hvor Pgr < Ptr.I dette tilfellet jobber motoren med et bevegelsesmoment (kraftnedstigning) og utvikler effekt, kW,

Basert på de gitte formlene er det mulig å bestemme kraften til kranmotoren ved enhver belastning på kroken. Når du beregner, bør det huskes at effektiviteten til mekanismen avhenger av belastningen (fig. 1).
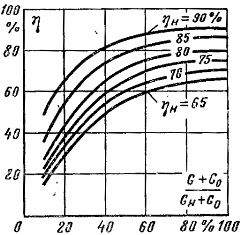
Ris. 1. Avhengighet av mekanismens effektivitet på lasten.
Kraften og dreiemomentet på akselen til motorene til de horisontale mekanismene for bevegelse av kranen i statisk driftsmodus kan bestemmes av formlene

hvor P er motorakseleffekten til kranbevegelsesmekanismen, kW; M er motorakselmomentet til bevegelsesmekanismen, Nm; G — vekt av transportert last, N; G1 — egenvekt av bevegelsesmekanismen, N; v — bevegelseshastighet, m/s; R er radiusen til hjulet, m; r er radiusen til halsen på hjulakselen, m; μ — glidefriksjonskoeffisient (μ = 0,08-0,12); f - rullefriksjonskoeffisient, m (f = 0,0005 - 0,001 m); η — effektiviteten til bevegelsesmekanismen; k — koeffisient som står for friksjonen til hjulflensene på skinnene; i — girforholdet til undervognsreduksjonen.
I en rekke løfte- og transportmekanismer skjer ikke bevegelsen i horisontal retning. Effekten av vindbelastning etc. er også mulig. Formelen for å bestemme kraften i dette tilfellet kan representeres som

I tillegg merket: α — hellingsvinkelen til føringene til horisontalplanet; F — spesifikk vindbelastning, N / m2; S er området som vindtrykket virker på i en vinkel på 90 °, m2.
I den siste formelen karakteriserer det første leddet motorakselkraften som kreves for å overvinne friksjon under horisontal bevegelse; det andre leddet tilsvarer løftekraften, det tredje er kraftkomponenten fra vindlasten.
En rekke kraner har en dreieskive som arbeidsutstyret er plassert på. Bevegelsen til plattformen overføres gjennom et tannhjul (dreieskive) med en diameter Dkp montert på den. Mellom plattformen og den faste basen er det ruller (ruller) med en diameter på dp. I dette tilfellet blir kraften og dreiemomentet til kranmotoren på grunn av friksjonskrefter funnet på samme måte som tilfellet med frem- og tilbakegående bevegelse, nemlig:

Her, i tillegg til de kjente verdiene: G2 er vekten av platespilleren med alt utstyr på, N; ωl — vinkelhastighet, plattformer, rad/sek; i — utveksling av svingmekanismens girkasse og drivgiret til transmisjonen — dreieskive.

Når du bestemmer kraften til den elektriske kranen, er det i noen tilfeller nødvendig å ta hensyn til endringen i belastningen når du arbeider i en skråning. Vindbelastningen på de roterende mekanismene bestemmes ved å ta hensyn til forskjellen i vindkreftene som virker på lasten, kranbommen og motvekten.
Ved utforming av elektriske drev for kranmekanismer, på slutten av motorvalget, kontrolleres den elektriske stasjonen for tillatte akselerasjonsverdier, dataene for disse er gitt i tabell 1
Tabell 1 Navn på mekanismene og deres formål
Navnet på mekanismene og deres formål Akselerasjon, m/s2 Løftemekanismer beregnet for løfting av flytende metaller, skjøre gjenstander, produkter, ulike monteringsarbeider 0.1 Løftemekanismer for monteringsparker og metallurgiske verksteder 0.2 — 0.5 Løftemekanismer for gripekraner 0.8 Mekanismer bevegelse av kraner beregnet for presisjonsmonteringsarbeid og transport av flytende metaller, skjøre gjenstander 0,1 - 0,2 Bevegelsesmekanismer med tyngdekraftens tiltrekningskraft på full 0,2 - 0,7 Kranvogner med full grep 0,8 - 1,4 kransvinger 0,5 - 1,2