Strukturelle former for asynkronmotorer
 Ytre strukturelle former asynkrone motorer bestemmes av måten motoren er montert på og formen på dens beskyttelse mot påvirkning fra miljøet. Normal benmotorisk ytelse er utbredt (fig. 1, a). I dette tilfellet må motorakselen være horisontal. Motorer med flenser (fig. 1, b) er mye brukt for horisontale og vertikale installasjoner.
Ytre strukturelle former asynkrone motorer bestemmes av måten motoren er montert på og formen på dens beskyttelse mot påvirkning fra miljøet. Normal benmotorisk ytelse er utbredt (fig. 1, a). I dette tilfellet må motorakselen være horisontal. Motorer med flenser (fig. 1, b) er mye brukt for horisontale og vertikale installasjoner.
De produserer også inline induksjonsmotorer som ikke har noen ramme, endeskjold, aksel. Elementer til en slik motor er innebygd i delene av maskinkroppen, og motorakselen er en av maskinakslene (ofte spindelen), og sengen er kroppen til maskinenheten, for eksempel et slipehode (fig. . 2).
Spesialdesignmotorer er vidt distribuert i utlandet, inkludert motorer med små radielle dimensjoner og betydelig lengde, og skivemotorer, spesielt med en sylinderformet stator og en ringformet ytre rotor. Motorer brukes også, når de er slått på, beveger rotoren, som har form av en kjegle, seg i en aksial retning, og utvikler en betydelig skyvekraft.
Denne kraften brukes til å frigjøre den mekaniske bremsen som virker på motorakselen etter at motoren er koblet fra strømnettet. I tillegg brukes en rekke motordesigner med påmonterte girkasser, girkasser og mekaniske variatorer som gir jevn regulering.
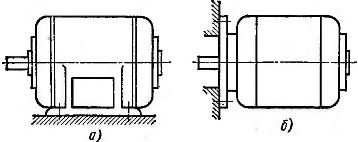
Ris. 1. Design av asynkronmotorer
Ulempen med å bruke motorer med spesielle designformer er vanskeligheten med å erstatte dem i tilfelle en ulykke. En defekt elektrisk motor skal ikke skiftes ut, men repareres, og maskinen går på tomgang under reparasjonen.
For å drive maskinene brukes motorer med ulike former for miljøvern.
Skjermede motorer har griller som dekker ventilene på endeskjoldene. Dette hindrer fremmedlegemer i å komme inn i motoren og hindrer også arbeideren i å berøre roterende og spenningsførende deler. For å hindre at væskedråper faller ovenfra, er motorene utstyrt med nedadgående eller vertikale ventiler.
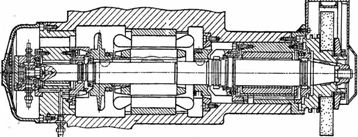
Ris. 2. Innebygd slipemotor
Men når en slik elektrisk motor fungerer i et verksted, suger dens vifte sammen med luft inn støv, sprayer kjølevæske eller olje, samt små partikler av stål eller støpejern, som fester seg til isolasjonen til viklingen og vibrerer under påvirkning av et vekslende magnetfelt, slites isolasjonen raskt ut.
Lukkede motorer, hvis endeskjermer ikke har ventilasjonshull, har mer pålitelig beskyttelse mot miljøpåvirkninger. Slike motorer, med samme dimensjoner som beskyttede, har på grunn av dårligere kjøling mindre kraft.Med samme krefter og hastigheter er den lukkede elektriske motoren 1,5-2 ganger tyngre enn den beskyttede, og følgelig er prisen høyere.
Ønsket om å redusere størrelsen og kostnadene til lukkede motorer førte til opprettelsen av lukkede blåste elektriske motorer. En slik elektrisk motor har en ekstern vifte montert på enden av motorakselen motsatt drivenden og dekket med en hette. Denne viften blåser rundt motorhuset.
Viftemotorer er betydelig lettere og billigere enn lukkede. Blåste motorer brukes oftest til å drive metallskjæremaskiner. Motorer med andre former for miljøvern brukes relativt sjelden til å drive metallskjæremaskiner. Spesielt er lukkede elektriske motorer noen ganger brukt til å drive slipemaskiner.
Elektriske motorer er konstruert for standardspenninger på 127, 220 og 380 V. Den samme motoren kan kobles til nettverk med forskjellige spenninger, for eksempel til nettverk med spenninger på 127 og 220 V, 220 og 380 V. med to spenninger, statorviklingen til den elektriske motoren er koblet i en trekant, for en større - i en stjerne. Strømmen i viklingene til den elektriske motoren og spenningen i dem vil være den samme i begge tilfeller med denne inkluderingen. I tillegg produserer de elektriske motorer 500 V, deres statorer er permanent koblet i en stjerne.
Asynkrone ekorn-burmotorer som brukes i mange bransjer produseres med en merkeeffekt på 0,6-100 kW pr. synkrone hastigheter 600, 750, 1000, 1500 og 3000 o/min.
Tverrsnittet av ledningene til viklingen til den elektriske motoren avhenger av størrelsen på strømmen som strømmer gjennom den. Med større strøm vil motorviklingen ha større volum.Tverrsnittet av den magnetiske kretsen er proporsjonal med størrelsen på den magnetiske fluksen. På denne måten bestemmes dimensjonene til den elektriske motoren av de beregnede verdiene for strøm og magnetisk fluks eller det nominelle dreiemomentet til den elektriske motoren. Nominell motoreffekt

hvor P.n — nominell effekt, kW, Mn- nominelt moment, N • m, nn- nominelt turtall, rpm.
Nominell effekt for samme motorstørrelse øker ettersom dens nominelle hastighet øker. Derfor er lavhastighets elektriske motorer større enn høyhastighetsmotorer med samme effekt.
Ved sliping av små hull kreves det svært høye slipespindelhastigheter for å oppnå tilstrekkelig skjærehastighet. Så når du sliper med et hjul med en diameter på 3 mm med en hastighet på bare 30 m / s, bør hastigheten på spindelen være lik 200 000 omdreininger per minutt. Ved høye spindelhastigheter kan klemkraften reduseres kraftig. Samtidig reduseres hjulsliping og dorbøyning, og overflatefinishen og maskineringsnøyaktigheten økes.
I forbindelse med ovennevnte bruker industrien en rekke modeller av såkalte. Elektriske spindler med rotasjonshastigheter på 12.000-144.000 o/min og høyere. Elektrospindelen (fig. 3, a) er en slipespindel på rullelager med innebygd høyfrekvent ekorn-burmotor. Motorrotoren er plassert mellom to lagre i enden av spindelen motsatt slipeskiven.
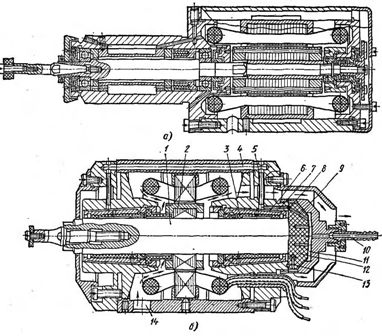
Ris. 3. Elektrospindler
Den elektriske spindelstatoren er satt sammen av stålplate. En bipolar spole er plassert på den.Motorrotoren med hastigheter opp til 30 000-50 000 rpm er også slått fra metallplater og leveres med en konvensjonell kortslutningsvikling. De har en tendens til å redusere diameteren på rotoren så mye som mulig.
Valget av lagertype er spesielt viktig for driften av elektrospindler. Presisjonskulelager er ofte brukt, som opererer med en forspenning opprettet ved hjelp av kalibrerte fjærer. Slike lagre brukes for rotasjonshastigheter som ikke overstiger 100 000 omdreininger per minutt.
Aerostatiske lagre er mye brukt i industrien (fig. 3, b). Akselen 1 til den høyfrekvente elektriske motoren roterer i luftsmurte lagre 3. Den aksiale belastningen absorberes av luftputen mellom enden av akselen og støttelageret 12, mot hvilken akselen presses under trykket fra luften som tilføres det indre av huset gjennom hullet 14 for kjøling av motoren. komprimert luft passerer gjennom filteret og kommer inn gjennom armaturet 10 i kammeret 11. Herfra, gjennom kanalen 9 og det sirkulære sporet 8, passerer luften inn i kanalen 7 og kammeret 6. Derfra kommer luften inn i lageret mellomrom. Luft tilføres til venstre lager gjennom rør 5 og kanaler 4 i motorhuset.
Avtrekksluften slippes ut gjennom kanalene 13. Luftputen i støttelagerspalten dannes ved at luften passerer fra kammeret 11 gjennom lageret laget av porøs karbongrafitt. Hvert lager har konisk messing. En karbongrafittforing er presset inn i den, hvis porer er fylt med bronse. Før start av elektrospindelen tilføres luft og det dannes luftputer mellom spindelen og foringene. Dette eliminerer friksjon og slitasje på lagrene under oppstart.Etter det slås motoren på, hastigheten til rotoren 2 når den nominelle hastigheten på 5-10 s. Når motoren er slått av, ruller rotor 2 i 3-4 minutter. For å redusere denne tiden brukes en elektrisk brems.
Bruk av kollisjonsputer reduserer friksjonstapene i den elektriske spindelen drastisk, luftforbruket er 6-25 m3/t.
Det er også brukt elektrospindler på lagre med flytende smøring. Deres drift krever kontinuerlig sirkulasjon av olje under høyt trykk, ellers blir oppvarmingen av lagrene uakseptabel.
Produksjonen av høyfrekvente elektriske motorer krever presisjonsproduksjon av individuelle deler, dynamisk balansering av rotoren, presis montering og sikring av streng jevnhet i gapet mellom statoren og rotoren. Frekvensen til strømmen som forsyner den høyfrekvente elektriske motoren velges avhengig av den nødvendige hastigheten til den elektriske motoren:

hvor nHvis den synkrone rotasjonsfrekvensen til den elektriske motoren, rpm, f er frekvensen til strømmen, Hz, p er antall poler, siden p = 1, da

Ved synkrone rotasjonshastigheter til de elektriske spindlene på 12 000 og 120 000 rpm, bør strømfrekvensen være lik henholdsvis 200 og 2000 Hz.
Spesielle generatorer brukes til å drive høyfrekvente motorer. I fig. 4 viser en trefaset synkron induksjonsgenerator. Generatorstatoren har brede og smale slisser. Feltspolen, som er plassert i de brede sporene på statoren, forsynes med likestrøm. Magnetfeltet til lederne til denne spolen er lukket gjennom statortennene og rotorfremspringene som vist i fig. 4 med stiplet linje.
Når rotoren roterer, krysser magnetfeltet som beveger seg langs rotorfremspringene svingene til vekselstrømsviklingen som er plassert i de smale sporene på statoren og induserer en vekselvis e. etc. c. Hyppigheten av denne e. etc. v. avhenger av hastighet og antall rotorører. De elektromotoriske kreftene indusert av den samme fluksen i de feltviklede viklingene kansellerer hverandre på grunn av den forestående aktiveringen av spolene. Feltspolene drives av en likeretter koblet til strømnettet. Statoren og rotoren har magnetiske kjerner laget av elektrisk platestål.
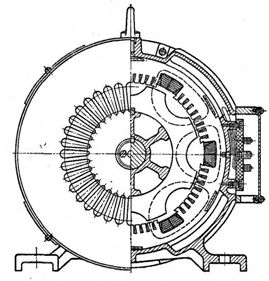
Ris. 4. Høyfrekvent induksjonsgenerator
Generatorer med det beskrevne designet produseres for nominell effekt fra 1 til 3 kW og frekvenser fra 300 til 2400 Hz. Generatorene drives av asynkronmotorer med et synkront turtall på 3000 rpm.
Induksjonsgeneratorer med økt frekvens begynner å bli erstattet av halvleder (tyristor) omformere. I dette tilfellet gir de vanligvis muligheten til å endre frekvensen til strømmen og derfor muligheten til å justere rotasjonshastigheten til den elektriske motoren. Hvis spenningen holdes konstant under slik regulering, utføres konstant effektregulering. Hvis forholdet mellom spenning og frekvens av strømmen (og derfor den magnetiske fluksen til motoren) holdes konstant, utføres reguleringen med en konstant ved alle hastigheter i lang tid tillatt dreiemoment.
Fordelene med frekvensomformere med tyristor frekvensomformer og asynkron ekorn-burmotor er høy effektivitet og brukervennlighet. Ulempen er fortsatt den høye prisen.I maskinteknikk anbefales det mest å bruke en slik drivenhet for høyfrekvente motorer. Eksperimentelle stasjoner av denne typen er opprettet i vårt land.
Laveffekt to-fase asynkronmotorer brukes ofte i maskinverktøyutøvende stasjoner. Statoren til en slik motor har to viklinger: feltvikling 1 og kontrollvikling 2 (fig. 5, a). Rotor 4 i et ekornbur har stor aktiv motstand. Aksen til spolene er vinkelrett på hverandre.
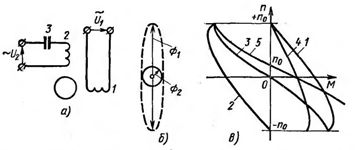
Ris. 5. Opplegg av en to-fase induksjonsmotor og dens egenskaper
Spenningene Ul og U2 påføres viklingene. Når kondensatoren 3 er koblet til kretsen til spolen 2, overstiger strømmen i den strømmen i spolen 1. I dette tilfellet dannes et roterende elliptisk magnetfelt og rotoren 4 til ekornet begynner å rotere. Reduserer du spenningen U2 vil også strømmen i spole 2 avta. Dette vil føre til en endring i formen på ellipsen til det roterende magnetfeltet, som blir mer og mer forlenget (fig. 5, b).
En elliptisk feltmotor kan betraktes som to motorer på en aksel, en som opererer med et pulserende felt F1 og den andre med et sirkulært felt F2. F1 pulserende feltmotor kan betraktes som to identiske sirkulære induksjonsmotorer koblet til å rotere i motsatte retninger.
I fig. 5, c viser de mekaniske egenskapene 1 og 2 til en induksjonsmotor med et sirkulært rotasjonsfelt og en betydelig aktiv motstand til rotoren ved rotasjon i forskjellige retninger. Den mekaniske karakteristikken 3 til en enfasemotor kan konstrueres ved å subtrahere momentene M til karakteristikkene 1 og 2 for hver verdi av n.Ved enhver verdi på n stoppes dreiemomentet til en enfasemotor med høy rotormotstand. Den mekaniske karakteristikken til den sirkulære feltmotoren er representert av kurve 4.
Den mekaniske karakteristikken 5 til en tofasemotor kan konstrueres ved å subtrahere momentene M til karakteristikkene 3 og 4 ved en hvilken som helst verdi av n. Verdien av n0 er rotasjonshastigheten til en to-fase induksjonsmotor ved ideell tomgangshastighet. Ved å justere forsyningsstrømmen til spole 2 (fig. 5, a), er det mulig å endre helningen til karakteristikk 4 (fig. 5, c), og dermed verdien av n0. På denne måten utføres hastighetskontrollen til en tofase induksjonsmotor.
Ved drift med høye slipverdier blir tapene i rotoren ganske betydelige. Av denne grunn brukes den betraktede reguleringen kun for laveffekts hjelpedrifter. For å redusere akselerasjons- og retardasjonstiden brukes to-fase induksjonsmotorer med hul rotor. I en slik motor er rotoren en tynnvegget hul sylinder av aluminium.