Selsyns: formål, innretning, handlingsprinsipp
 Selsyn er en spesiell type elektrisk vekselstrømsmaskin med effekt fra noen få watt til flere hundre watt (mindre enn en kilowatt). Betjener selsyn til å eksternt overføre den mekaniske rotasjonsvinkelen elektrisk mellom enheter som ikke har noen mekanisk forbindelse til hverandre.
Selsyn er en spesiell type elektrisk vekselstrømsmaskin med effekt fra noen få watt til flere hundre watt (mindre enn en kilowatt). Betjener selsyn til å eksternt overføre den mekaniske rotasjonsvinkelen elektrisk mellom enheter som ikke har noen mekanisk forbindelse til hverandre.
Hver selsin har en stator og en rotor som vekselstrømsviklingene er plassert på. Det er spoler med en enkelt vikling på statoren og en vikling med tre viklinger på rotoren, og omvendt, med en vikling på tre viklinger på statoren og en vikling med en vikling på rotoren, og til slutt, med en vikling med tre viklinger på statoren og med samme vikling på rotoren.
I henhold til deres formål i autoreguleringsordninger er selssyns delt inn i:
- Selsyn sensorer,
- selsyn mottakere
- differensial.
For å forstå driften av selsyn, vurder fig. 1, a.
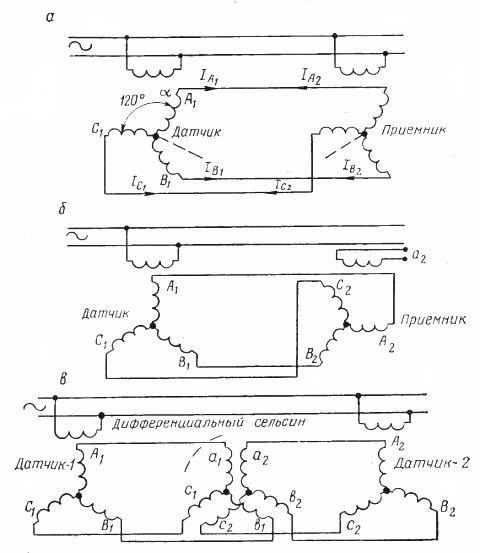
Ris. 1. Opplegg for å slå på selsin: a — i henhold til systemsensoren — mottaker; b — transformatormottaker i transformatormodus; c — differensial
Selsyn-sensoren og selsyn-mottakeren med sine enkelt-viklinger statorviklinger er koblet til samme AC-nettverk, og tre-vikling rotorviklinger er koblet til hverandre. Hvis du nå roterer sensorrotoren til en hvilken som helst vinkel, vil mottakerrotoren rotere til samme vinkel. Hvis sensorrotoren roterer kontinuerlig med en tilfeldig hastighet, vil mottakerrotoren rotere med samme hastighet.
Virkningen av Selsin-forbindelsen er basert på prinsippet om elektromagnetisk induksjon, som er som følger. Vekselstrømmen i den enkeltviklede statorviklingen induserer strømmer i den treviklingsrotorviklingen, hvis verdier avhenger av den relative posisjonen til rotoren og statorviklingen.
Hvis rotorene til de to selsinene er like fordelt med hensyn til deres statorer, er strømmene i rotorenes forbindelsestråder like og motsatte av hverandre, og derfor er strømmen i hver spole null. Som et resultat er akselmomentet til begge selsyn null.
Hvis du nå manuelt eller på annen måte dreier rotoren til selsin-sensoren til en viss vinkel, vil strømbalansen mellom rotorene bli forstyrret, og et dreiemoment vil vises på akselen til selsin-mottakeren, på grunn av at rotoren vil rotere , mens strømmenes ubalanse forsvinner. Det vil si inntil denne rotoren tar samme posisjon som synkrosensoren.

I autoreguleringssystemer opererer selsyn-mottakeren ofte i transformatormodus (fig. 1, b). I dette tilfellet er rotoren til mottakeren fast stasjonær, og statorviklingen er koblet fra nettverket. I denne spolen induseres e. etc. v. på siden av rotoren, gjennom hvis viklinger strømmer strømmer på grunn av posisjonen til rotoren til selsyn-sensoren.Dette betyr at verdien av e. etc. med terminalene er rotoren på mottakeren proporsjonal med rotasjonsvinkelen til sensoren.
I utgangsposisjonen er rotorene forskjøvet med 90 ° i forhold til hverandre, og i dette tilfellet f.eks. etc. s. er null. Nå som rotorsensoren er rotert, vil e bli indusert på mottakerrotoren. etc. med Ep, proporsjonal med divergensvinkelen til rotorene
Epr = Emax x sinθ
Differensialselsyn brukes i tilfeller hvor det er nødvendig å kontrollere forskjellen i rotasjonsvinklene til to akser, dvs. deres avvik. I dette tilfellet er to selsin-sensorer plassert på to aksler, hvis hastigheter sammenlignes med hverandre. Rotorene til disse selsinene er forbundet med treviklingsviklingene til statorens treviklingsviklinger og rotoren til den tredje. selsin, som er differensial (fig. 1, in). Rotasjonsvinkelen til Selsyn-differensialrotoren er lik forskjellen mellom rotasjonsvinklene til Selsyn-sensorene.