Sensorkoblingsskjemaer
Tilkoblingsskjemaer for sensorer, oftere kalt målekretser, er designet for å konvertere utgangsverdien til sensoren, og i de fleste tilfeller er dette en endring i deres indre motstand, til en mer praktisk verdi for senere bruk. Som regel er dette en elektrisk strøm eller spenningsendring som enten kan bestemmes direkte ved hjelp av en elektrisk måleenhet eller, etter å ha blitt forsterket, matet til en passende aktuator eller registreringsenhet.

For disse formålene er følgende bytteordninger mye brukt:
-
konsistent,
-
fortau,
-
differensial,
-
kompenserende.
Sekvensielt kretsskjema består av en likestrøms- eller vekselstrømkilde, selve Rx-sensoren, en måleenhet eller direkte drivmekanisme, og vanligvis en ekstra motstand Rd som begrenser strømmen i denne kretsen (fig. 1). En slik koblingskrets er oftest mye brukt bare med kontaktsensorer for hvilke Rx = 0 eller Rx = ?.
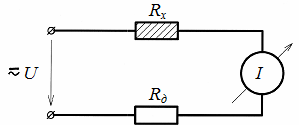
Ris. 1. Seriell krets for tilkobling av sensorer
Fordi når du arbeider med andre sensorer i kretsen til måleanordningen, flyter alltid en elektrisk strøm bestemt av uttrykket I = U /(Rx + Rd), og en liten endring i sensorens indre motstand fører til en veldig liten endring i denne strømmen. Som et resultat brukes minimumsseksjonen av skalaen til måleanordningen, og nøyaktigheten av målingen er praktisk talt redusert til null. Derfor, for de fleste andre sensorer, brukes spesielle målekretser, som øker målingens følsomhet og nøyaktighet betydelig.
Mest brukt brokrets svitsjing, der en og noen ganger flere sensorer er koblet på en bestemt måte sammen med tilleggsmotstander i en firkant (den s.k. Winston Bridge), som har to diagonaler (fig. 2). En av dem, kalt a-b power diagonal, er designet for å koble til en DC- eller AC-kilde, og den andre, c-d-målediagonal, inkluderer en måleenhet.
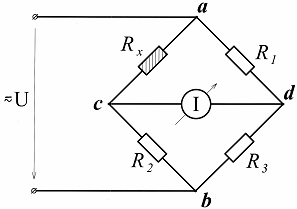
Ris. 2. Brokrets for tilkobling av sensorer
Hvis produktene av motstandsverdiene til de motsatte sidene av firkanten (broarmer) er like Rx x R3 = R1NS R2, vil potensialene til punktene c og d være like, og det vil ikke være strøm i målediagonalen. Denne tilstanden til brokretsen kalles vanligvis brobalanse, dvs. brokretsen er balansert.
Hvis motstanden til Rx-sensoren endres på grunn av ytre påvirkning, vil balansen bli forstyrret og en strøm proporsjonal med endringen i denne motstanden vil strømme gjennom måleapparatet. I dette tilfellet indikerer retningen til denne strømmen hvordan motstanden til sensoren har endret seg (økt eller redusert).Her, med et passende valg av følsomheten til måleapparatet, alt sammen arbeidsskala.
Brokretsen som vurderes kalles ubalansert, da måleprosessen finner sted kl ubalanse bro, dvs. ubalanse. En ubalansert brokrets brukes oftest i tilfeller hvor motstanden til sensoren under påvirkning av ytre krefter kan endre seg veldig raskt per tidsenhet, men da i stedet for en måleenhet er det mer hensiktsmessig å bruke en registreringsenhet som vil registrere disse endringer.
Det anses som mer følsomt balansert brokrets, hvor en spesiell målereostat R (fig. 3), utstyrt med en skala og kalt en reokord i måleteknikken, i tillegg er koblet til to tilstøtende armer.
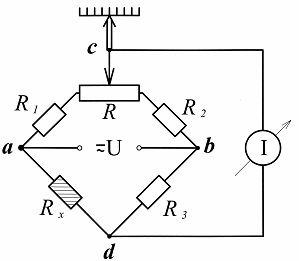
Ris. 3. Balansert brokrets
Når du arbeider med en slik krets, med hver endring i motstanden til sensoren, må brokretsen rebalanseres med den medfølgende glideren, dvs. mens det ikke er strøm i målediagonalen. I dette tilfellet bestemmes verdien av den målte parameteren (endring i motstandsverdien til sensoren) av en spesiell skala som er utstyrt med denne posten og kalibrert i enheter av verdien målt av sensoren.
Den høyere nøyaktigheten til den balanserte broen forklares av det faktum at det er lettere å bestemme mangelen på strøm i måleanordningen enn å måle verdien direkte, og balansering av broen i slike tilfeller utføres som regel ved hjelp av en spesiell elektrisk motor kontrollert av brokretsens ubalansesignal.
Brokretser for å bytte sensorer anses som universelle, siden de kan drives av både like- og vekselstrøm, og viktigst av alt kan flere sensorer kobles til disse kretsene samtidig, noe som bidrar til å øke ikke bare følsomheten, men også målenøyaktighet.
Differensialkrets inkluderingen av sensorer er bygget ved hjelp av en spesiell transformator drevet av et vekselstrømnettverk, hvis sekundære vikling er delt inn i to identiske deler. I denne kretsen (fig. 4) dannes således to tilstøtende kretser, som hver har sin egen strømsløyfe I1 og I2. Og verdien av strømmen i måleenheten bestemmes av forskjellen mellom disse strømmene, og hvis motstandene til sensoren Rx og tilleggsmotstanden Rd er like, vil det ikke være noen strøm i måleenheten.
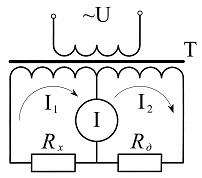
Ris. 4. Differensial sensor koblingskrets
Når motstanden til sensoren endres, vil en strøm proporsjonal med denne endringen flyte gjennom måleanordningen, og fasen til denne strømmen vil avhenge av arten av endringen i denne motstanden (økning eller reduksjon). Kun vekselstrøm brukes til å drive differensialkretsen, og derfor er det mer hensiktsmessig å bruke reaktive sensorer (induktive eller kapasitive) som sensorer.
Det er spesielt praktisk å bruke en slik koblingskrets når du arbeider med differensielle induktive eller kapasitive sensorer. Når du bruker slike sensorer, registreres ikke bare størrelsen på bevegelsen, for eksempel av den ferromagnetiske kjernen (fig. 5), men også retningen til denne bevegelsen (dens tegn), som et resultat av at fasen til den vekslende strøm som går gjennom måleapparatet, endres.Dette øker følsomheten til målingen ytterligere.
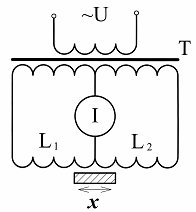
Ris. 5. Koblingsskjema for en induktiv differensialsensor
Det skal bemerkes at for å øke nøyaktigheten av målingen, brukes i noen tilfeller andre typer lignende målekretser, f.eks. balanserte differensialkretser… Slike kretser inkluderer enten en repetert akkord eller en spesiell målingsautotransformator med en spesiell skala, og måleprosessen med slike kretser ligner på målinger med en balansert brokrets.
Kompensasjonsordning inkludering av sensorer anses som den mest nøyaktige av alle de som er diskutert ovenfor. Driften er basert på utgangsspenningskompensasjon eller EMF. en sensor lik den når det gjelder spenningsfallet i målereostaten (reokord). Bare en DC-kilde brukes til å drive kompensasjonskretsen, og den brukes hovedsakelig med DC-generatorsensorer.
La oss se på driften av denne kretsen ved å bruke eksemplet med å bruke et termoelement som en sensor (fig. 6).
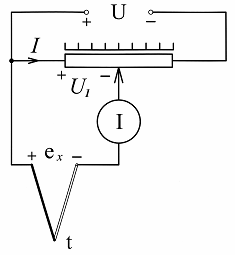
Ris. 6. Kompensasjonskrets for å slå på termoelektrisk sensor
Under påvirkning av den påtrykte spenningen U flyter en strøm gjennom målereostaten, som forårsaker et fall i spenningen U1 i seksjonen av reostaten fra venstre utgang til motoren. I tilfelle likestilling mellom denne spenningen og EMF-termoelementene vil det ikke gå noen strøm gjennom glukometeret.
Hvis verdien av emf-sensoren endres, er det nødvendig å oppnå fraværet av denne strømmen igjen ved å bruke glidebryteren til glidebryteren. Her, som i likevektsbrokretsen, verdien av den målte parameteren, i vårt tilfelle temperaturen (emf termoelement) bestemmes av skalaen til glidetråden, og bevegelsen til motoren utføres, oftest, også ved hjelp av en spesiell elektrisk motor.
Den høye nøyaktigheten til kompensasjonskretsen skyldes det faktum at den elektriske energien som genereres av sensoren under målingen ikke forbrukes, siden strømmen i kretsen av dens inkludering er null. Denne kretsen kan også brukes med parametriske sensorer, men da trengs en ekstra DC-kilde, som brukes i strømforsyningskretsen til den parametriske sensoren.