Effekt av elektrisk motorbelastning på effektivitet og effekt
Kraftreserve generelt eller underbelastning av den elektriske motoren forårsaker forringelse av effektivitet og kraft. Noen ganger er det nødvendig å kjenne de faktiske verdiene til disse koeffisientene for å bestemme verdiene til den aktive og reaktive kraften som forbrukes av den elektriske motoren fra nettverket.
Effektiviteten til elektriske motorer ved belastninger mindre enn nominell kan bestemmes av formelen:
hvor ηnom er den nominelle virkningsgraden til den elektriske motoren.
For å bestemme β, bruk formelen:

hvor Kz er forholdet mellom den faktiske lasten og den nominelle (lastfaktoren);
α — koeffisient antatt lik:
• for DC-motorer med serieeksitasjon - fra 0,5 (for lav hastighet) til 1 (for høy hastighet);
• for elektriske motorer med parallell eksitasjon - fra 1 (for lav hastighet) til 2 (for høy hastighet);
• for asynkrone elektriske motorer - fra 0,5 til 1; for kran og synkrone elektriske motorer - opptil 2.
Verdiene maktfaktor induksjonsmotor avhenger av mange faktorer og er strengt tatt forskjellig for hver elektrisk motor, selv av samme type.
Under designforhold er det imidlertid tilstrekkelig å kjenne bare de omtrentlige gjennomsnittsverdiene til effektfaktoren avhengig av de forventede belastningene.
Fra et forenklet kakediagram får man følgende forhold:

Betegnelser — se fig. 1.
hvor tanφ1, er tangenten til fasevinkelen som tilsvarer den faktiske belastningen til den elektriske motoren P1, kW; tanφnom — tangenten til faseforskyvningsvinkelen som tilsvarer den nominelle belastningen til den elektriske motoren PH0M (bestemt av cosφnom spesifisert i motorpasset); σ-forholdet mellom det veltede momentet til det nominelle (er innenfor de snevre grensene på 1,8-2);

K3 — belastningsfaktor.
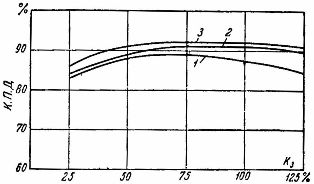
Ris. 1. Virkningsgradskurver for asynkrone forskjellige elektriske motorer avhengig av belastningen.
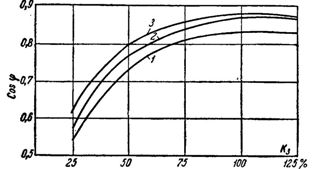
Ris. 2. Kurver av effektfaktoren til asynkrone elektriske motorer avhengig av belastningen.
Kurvene for avhengigheten av η og cosφ av lasten for de vanligste typene av asynkrone elektriske motorer er gitt i fig. 1 og 2.