Prinsippet for drift og enheten til den elektriske motoren
Enhver elektrisk motor er designet for å utføre mekanisk arbeid på grunn av forbruket av elektrisitet som brukes på den, som vanligvis omdannes til roterende bevegelse. Selv om det innen teknologi er modeller som umiddelbart skaper en translasjonsbevegelse av arbeidskroppen. Disse kalles lineære motorer.
I industrielle installasjoner driver elektriske motorer ulike metallskjæremaskiner og mekaniske enheter involvert i den teknologiske produksjonsprosessen.
Inne i husholdningsapparater kjører elektriske motorer vaskemaskiner, støvsugere, datamaskiner, hårfønere, barneleker, klokker og mange andre enheter.

Grunnleggende fysiske prosesser og handlingsprinsipp
Når du beveger deg inne magnetfelt elektriske ladninger, som kalles elektriske strømmer, har alltid en mekanisk kraft som har en tendens til å avbøye retningen i et plan vinkelrett på orienteringen til magnetfeltlinjene.Når en elektrisk strøm passerer gjennom en metalltråd eller en spole laget av den, har denne kraften en tendens til å bevege/rotere hver strømførende ledning og hele spolen som helhet.
Bildet nedenfor viser en metallramme med strøm som strømmer gjennom den. Et magnetfelt påført den skaper en kraft F for hver gren av rammen, som skaper en rotasjonsbevegelse.

Denne egenskapen til samspillet mellom elektrisk og magnetisk energi, basert på dannelsen av en elektromotorisk kraft i en lukket ledende sløyfe, settes i drift på hver elektrisk motor. Designet inkluderer:
-
en spole som en elektrisk strøm flyter gjennom. Den er plassert på en spesiell ankerkjerne og festet i roterende lagre for å redusere motstanden mot friksjonskrefter. Denne utformingen kalles en rotor;
-
stator, som skaper et magnetfelt, som med sine kraftlinjer trenger inn i elektriske ladninger som passerer langs svingene til rotorviklingen;
-
hus for plassering av stator. Inne i kroppen er det laget spesielle seter, inne i hvilke de ytre burene til rotorlagrene er montert.
Den forenklede utformingen av den enkleste elektriske motoren kan representeres av et bilde av følgende form.

Når rotoren roterer, genereres et dreiemoment, hvis kraft avhenger av enhetens generelle utforming, mengden påført elektrisk energi og dens tap under konverteringer.
Størrelsen på motorens maksimalt mulige dreiemoment er alltid mindre enn den elektriske energien som tilføres den. Den er preget av effektivitetsverdien.
Typer elektriske motorer
I henhold til typen strøm som flyter gjennom spolene, er de delt inn i DC- eller AC-motorer.Hver av disse to gruppene har et stort antall modifikasjoner ved hjelp av forskjellige teknologiske prosesser.
DC-motorer
De har et statormagnetisk felt skapt av en stasjonær fast permanente magneter eller spesielle elektromagneter med eksitasjonsspoler. Armaturspolen er fast montert i akselen som er festet i lagre og kan rotere fritt rundt sin egen akse.
Den grunnleggende strukturen til en slik motor er vist i figuren.

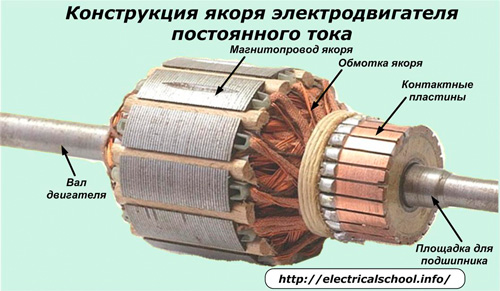
På kjernen av ankeret, laget av ferromagnetiske materialer, er det en spole som består av to seriekoblede deler, som er koblet til de ledende kollektorplatene i den ene enden og koblet til hverandre i den andre. To grafittbørster er plassert i diametralt motsatte ender av ankeret og presses mot kontaktputene til samleplatene.
Et positivt DC-kildepotensial påføres den nedre mønsterbørsten og et negativt potensial på den øvre. Retningen til strømmen som flyter gjennom spolen er vist med en stiplet rød pil.
Strømmen gjør at magnetfeltet får en nordpol nederst til venstre på ankeret, og en sørpol øverst til høyre på ankeret (gimbal-regel). Dette resulterer i frastøting av rotorpolene fra de stasjonære med samme navn og tiltrekning til de motsatte polene til statoren. Som et resultat av den påførte kraften oppstår en rotasjonsbevegelse, hvis retning er indikert med en brun pil.
Ved ytterligere rotasjon av ankeret ved treghet, overføres polene til andre samleplater. Strømretningen i dem er reversert. Rotoren fortsetter å rotere videre.
Den enkle utformingen av en slik samleanordning fører til store tap av elektrisk energi.Slike motorer fungerer i enheter med enkel design eller leker for barn.
Likestrøms elektriske motorer som er involvert i produksjonsprosessen har en mer kompleks design:
-
spolen er ikke delt i to, men i flere deler;
-
hver seksjon av spolen er montert på sin egen pol;
-
samleanordningen er laget med et visst antall kontaktputer i henhold til antall viklinger.
Som et resultat skapes en jevn tilkobling av hver pol gjennom kontaktplatene til børstene og strømkilden og energitapene reduseres.
Enheten til et slikt anker er vist på bildet.
I DC-motorer kan rotasjonsretningen til rotoren reverseres. For å gjøre dette er det nok å endre bevegelsen av strømmen i spolen til det motsatte ved å endre polariteten ved kilden.
AC motorer
De skiller seg fra tidligere design ved at den elektriske strømmen som flyter i spolen deres er beskrevet av sinusformet harmonisk lovmed jevne mellomrom endre retning (tegn). For å drive dem leveres spenning fra generatorer med vekslende tegn.
Statoren til slike motorer utføres av en magnetisk krets. Den er laget av ferromagnetiske plater med spor der svingene på spolen er plassert med en ramme (spole) konfigurasjon.

Synkrone elektriske motorer
Bildet nedenfor viser prinsippet om drift av en enfaset AC-motor med synkron rotasjon av de elektromagnetiske feltene til rotoren og statoren.

I sporene til statorens magnetiske krets ved diametralt motsatte ender er det plassert viklingstråder, skjematisk vist i form av en ramme som en vekselstrøm flyter gjennom.
La oss vurdere tilfellet med øyeblikket som tilsvarer passasjen av den positive delen av halvbølgen.
I lagercellene roterer en rotor med innebygget permanentmagnet fritt, hvor den nordlige «N-munningen» og den sørlige «S-munningen» av polen er tydelig definert. Når en positiv halvbølge av strøm flyter gjennom statorviklingen, dannes et magnetfelt med polene «S st» og «N st» i den.
Interaksjonskrefter oppstår mellom magnetfeltene til rotoren og statoren (med polene frastøtende og i motsetning til polene som tiltrekker seg) som har en tendens til å vri motorankeret fra en hvilken som helst posisjon til det ytterste når de motsatte polene er plassert så nær hverandre som mulig en annen.
Hvis vi vurderer det samme tilfellet, men for øyeblikket når det motsatte - en negativ halvbølge av strøm passerer gjennom rammetråden, vil rotasjonen av ankeret skje i motsatt retning.
For å sikre kontinuerlig bevegelse av rotoren i statoren, er det ikke laget en viklingsramme, men et visst antall av dem, gitt at hver av dem drives av en separat strømkilde.
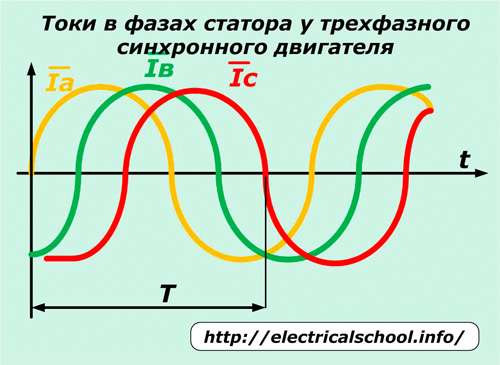
Arbeidsprinsippet for en trefaset vekselstrømsmotor med synkron rotasjon, de elektromagnetiske feltene til rotoren og statoren er vist på følgende bilde.

I dette designet er tre spoler A, B og C montert inne i statormagnetkretsen, forskjøvet med vinkler på 120 grader til hverandre. Spole A er merket med gult, B er grønt og C er rødt. Hver spole er laget med de samme rammer som i forrige tilfelle.
På bildet flyter i alle fall strømmen gjennom bare én spole i forover- eller bakoverretningen, som er indikert med tegnene «+» og «-«.
Når den positive halvbølgen går gjennom fase A i foroverretningen, inntar rotorfeltets akse en horisontal posisjon, fordi statorens magnetiske poler dannes i dette planet og tiltrekker seg det bevegelige ankeret. De motsatte polene til rotoren har en tendens til å nærme seg statorens poler.
Når den positive halvbølgen går inn i fase C, vil ankeret rotere 60 grader med klokken. Når strømmen er påført fase B, vil en lignende ankerrotasjon forekomme. Hver påfølgende strømflyt i neste fase av neste vikling vil snu rotoren.
Hvis en trefaset nettspenning forskjøvet med en vinkel på 120 grader påføres hver vikling, vil vekselstrømmer sirkulere i dem, noe som vil rotere ankeret og skape dens synkrone rotasjon med det påførte elektromagnetiske feltet.
Den samme mekaniske utformingen brukes med hell i en trefaset trinnmotor... Kun i hver vikling ved kontroll spesialkontroller (trinnmotordriver) Konstante pulser påføres og fjernes i henhold til algoritmen beskrevet ovenfor.
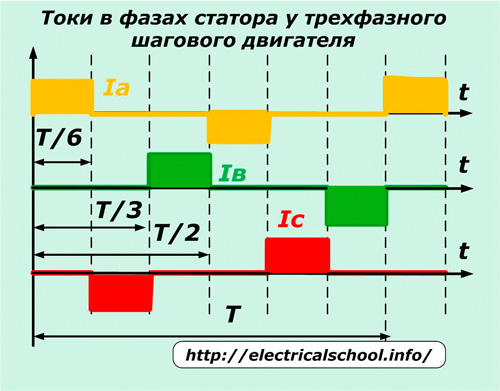
Oppstarten deres starter en rotasjonsbevegelse, og avslutningen deres på et bestemt tidspunkt gir en målt rotasjon av akselen og et stopp i en programmert vinkel for å utføre visse teknologiske operasjoner.
I begge de beskrevne trefasesystemene er det mulig å endre rotasjonsretningen til ankeret. For å gjøre dette trenger du bare å endre sekvensen av fasene «A» — «B» — «C» til en annen, for eksempel «A» — «C» — «B».
Rotorens hastighet reguleres av lengden på perioden T. Dens reduksjon fører til en akselerasjon av rotasjonen.Størrelsen på amplituden til strømmen i fasen avhenger av den indre motstanden til viklingen og verdien av spenningen som påføres den. Den bestemmer mengden dreiemoment og kraft til den elektriske motoren.
Asynkrone motorer
Disse motordesignene har samme statormagnetiske krets med viklinger som i de tidligere diskuterte enfase- og trefasemodellene. De får navnet sitt fra den asynkrone rotasjonen av anker- og stator-elektromagnetiske felt. Dette gjøres ved å forbedre konfigurasjonen av rotoren.
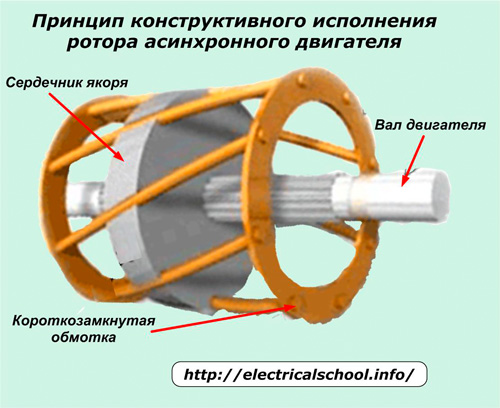
Kjernen er laget av rillede elektriske stålplater. De er utstyrt med strømledere av aluminium eller kobber, som er lukket i endene av ankeret med ledende ringer.
Når spenning påføres statorviklingene, induseres en elektrisk strøm i rotorviklingen av elektromotorisk kraft og et ankermagnetisk felt dannes. Når disse elektromagnetiske feltene samhandler, begynner motorakselen å rotere.
Med denne designen er bevegelsen av rotoren bare mulig etter forekomsten av et roterende elektromagnetisk felt i statoren, og den fortsetter i en asynkron driftsmodus med den.
Asynkronmotorer er enklere i design, derfor er de billigere og brukes mye i industrielle installasjoner og husholdningsapparater.

ABB eksplosjonssikker elektrisk motor
Lineære motorer
Mange arbeidskropper av industrielle mekanismer utfører frem- og tilbakegående eller translasjonsbevegelser i ett plan, noe som er nødvendig for driften av metallbearbeidingsmaskiner, kjøretøy, hammerslag når du slår påler ...
Å flytte et slikt arbeidslegeme ved hjelp av girkasser, kuleskruer, remdrift og lignende mekaniske enheter fra en roterende elektrisk motor kompliserer designet. Den moderne tekniske løsningen på dette problemet er driften av en lineær elektrisk motor.
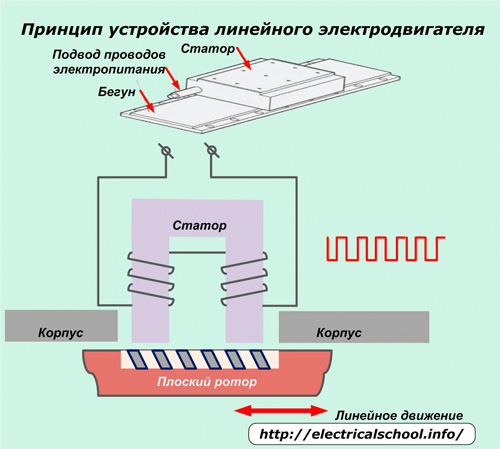
Statoren og rotoren er forlenget i form av strimler, i stedet for viklet til ringer, som i roterende elektriske motorer.
Driftsprinsippet er å gi frem- og tilbakegående lineær bevegelse til løperotoren på grunn av overføring av elektromagnetisk energi fra en stasjonær stator med en åpen magnetisk krets av en viss lengde. Et fungerende magnetfelt skapes inni det ved å slå på strømmen sekvensielt.
Den virker på armaturviklingen med en samler. Kreftene som oppstår i en slik motor beveger rotoren bare i en lineær retning langs styreelementene.
Lineærmotorer er konstruert for å operere på enten likestrøm eller vekselstrøm og kan operere i synkron eller asynkron modus.
Ulempene med lineære motorer er:
-
kompleksiteten til teknologien;
-
høy pris;
-
lav energieffektivitet.